我要投稿
我要投稿
美国麻省理工学院研究人员开发出一种3D打印的小型软体“机器人”,可被磁场操纵,有望应用于生物医药领域。
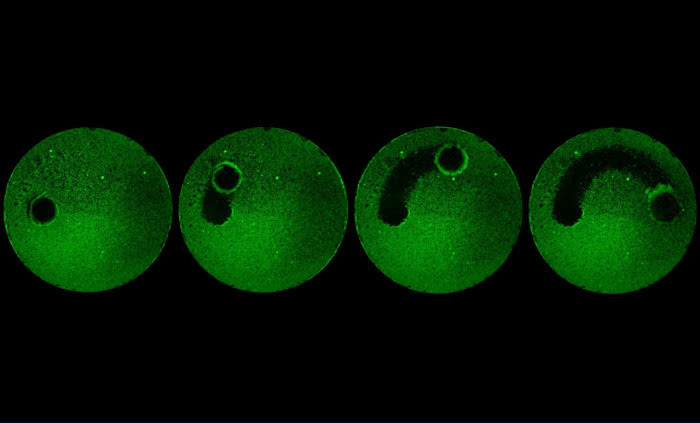
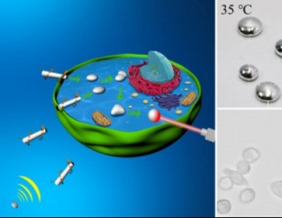
发表在最新一期《自然》杂志上的研究显示,这种“机器人”实际是一种形似雪花片的3D打印结构,完全伸展开最大直径约4厘米。在磁场操纵下,它能爬行、打滚、跳跃,能迅速收缩以抓住滚过的小球,还能裹住药片在桌面上移动。

麻省理工学院机械工程系教授赵选贺团队使用掺有磁性粒子的3D打印墨水,并在3D打印机喷嘴上安装电磁铁,在打印过程中控制磁性粒子的方向,制造出了这种可在外部磁场操纵下立刻发生精细变形的构造。
据介绍,这种用磁场操控的“机器人”不像一些电驱动的机器人那样需要高电压,而与使用水凝胶等材料制造的软体机器人相比,它的变形速度更快。
研究团队说,使用这种技术还可制造出具有不同形状和功能的“机器人”,例如制成环形结构嵌入电路和红绿LED灯,在外磁场作用下,环可以变形,从而点亮红灯或绿灯。
赵选贺说,这一发明有望广泛用于生物医学领域,例如可以将一个小型“机器人”放置于血管附近,控制血液流量;或者用它引导所需设备进入胃肠道,可拍照、获取组织样本、清除阻塞或精准给药。
文章链接:
Yoonho Kim, et al, "Printing ferromagnetic domains for untethered fast-transforming soft materials," Nature, volume 558, pages274–279 (2018)
(本文来源:新华社 作者: 周舟)

如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 软体机器人