我要投稿
我要投稿 近日,中国科学院沈阳自动化研究所田孝军教授及其科研团队设计出一种微型柔性游泳机器人,该机器人长2.6厘米,仅用光进行驱动和控制,不需要无线通讯设备和电池。相关研究成果在线发表12月4日自然出版集团旗下的《科学报告》上。
田孝军介绍,这种远程光驱动方式实现了复杂驱动控制微型机械手的结构,使得未来能够设计和制造更小的机器人。由于这种方法不需要电池、信息处理单元或者电机和传动机构,研究人员计划未来在医疗领域让这种微型机器人进入人的血管清理血管垃圾、血栓等,或让微型机器人携带药物通过血管进入癌症区域定点给
药治疗。
通常机器人需要由复杂的无线通讯零件、电子设备和能量储存设备组成,而这些设备限制了机器人微型化的程度。为了寻找替代方法,田孝军及其科研团队设 计出一种微型柔性的游泳机器人,由对紫外线(UV)敏感的含有偶氮苯生色团聚合物的薄膜制作,不仅可在水中游动,还可携带货物。
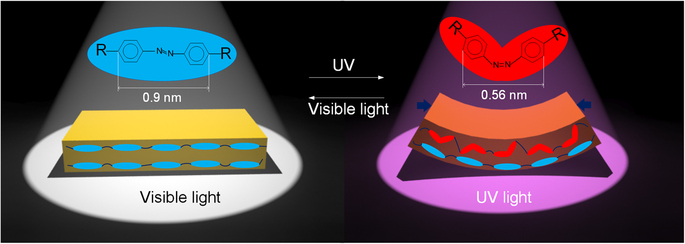
研究人员用周期性闪烁的紫外线和白光,对机器人的鞭毛进行控制,使其来回摆动,推动机器人在充满液体的玻璃管中前进。研究人员将含有偶氮苯生色团聚合物的薄膜比喻成是机器人的“马达”,紫外线与白光的交替工作比喻成是机器人的“电源和信号线”。
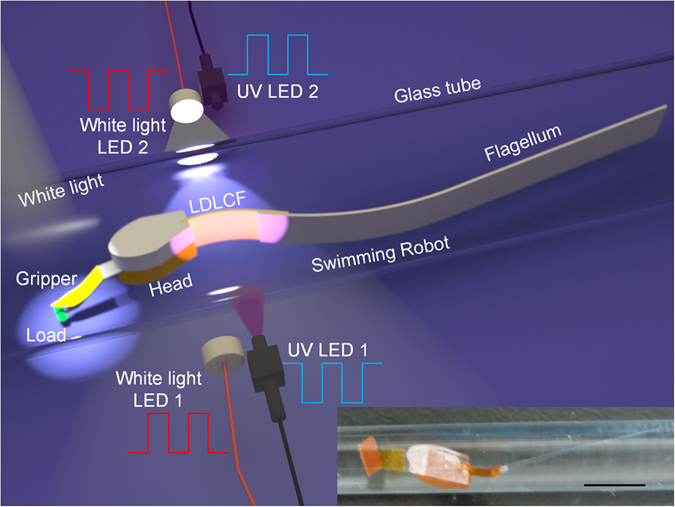
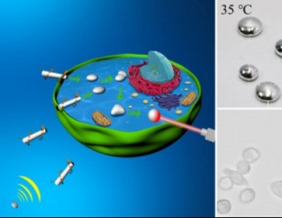
微型游泳机器人和光照系统示意图
与此同时,研究人员用另外一组光信号控制机器人头部夹持器,其可以通过控制光信号来指挥机器人抓住并携带负载。为避免两路光路相互干扰,研究人员设计了两路垂直交叉的光源系统,用水平面的光源控制鞭毛在水平面上摆动,用垂直面的光源控制夹持器的开与合。
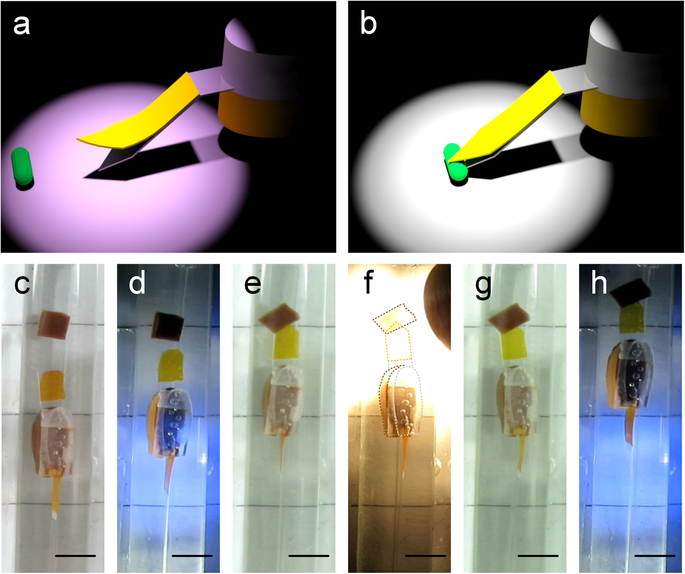
微型游泳机器人用夹具携带和运输的负荷。
田孝军教授简介:
中国科学院沈阳自动化研究所机器人学研究室教授,硕士生导师
(本文整理自中科院沈阳自动化研究所网站http://www.sia.cn/)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 微型柔性
- 游泳机器人
- 光驱动









 赞 1
赞 1
 回复
回复