我要投稿
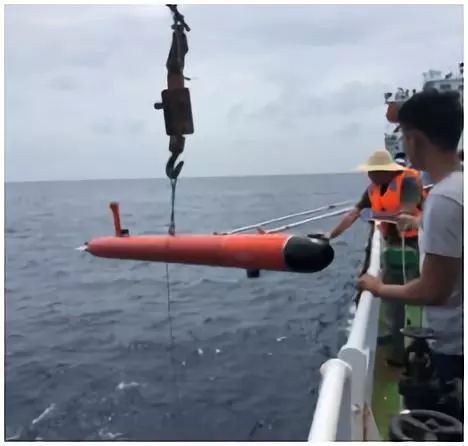
我要投稿以UUV、AUV、ROV和载人潜水器为代表的水下潜航器,作为海洋调查、资源开发和军事用途的重要手段,具有活动范围广、体积小、隐蔽性好、可进入深海空间、可执行危险任务和在恶劣环境下作业等优点,在民用和军事上均得到了广泛应用。

(图片来源于网络)
水下高精度导航定位与通信技术是潜航器完成观测作业的重要保障,高精度导航定位是水下潜航器获取有效信息的必要条件,更是决定潜航器水下安全作业以及顺利返回的关键因素;水下通信是潜航器实现信息交互的主要技术途径。
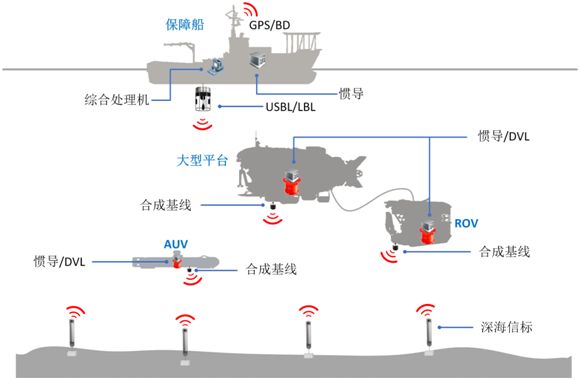
本文针对大潜深、远航程、长航时深海潜航器及其编队的高精度导航定位需求,提出一种惯性和水声紧组合的多参量水下导航定位技术,利用惯性导航设备的短时高精度和水声导航设备精度不随时间漂移的优点,在原始测量数据层面将惯性导航技术和声学导航技术紧密融合,充分发挥惯性导航和声学导航技术的互补性。依托在南海建设的海底信息服务区,组建区域性的高精度导航定位与通信系统,可以满足深海潜航器的低功耗、小尺寸和低成本的导航定位与通信需求,为潜航器深海观测作业提供信息支撑。
水下通信主要应用声波、低频无线电和光波作为信息载体。水下无线电波传播速度更快,信道条件更好,但信号衰减严重,通信距离小于100m,且发射功率高、天线体积庞大;水下光通信的通信速率可达Mbps,但信号衰减同样严重,且对介质清澈程度要求较高;水声通信具有远距离传输的优势,但水声信道时变、空变性强,噪声高,多途干扰严重,且通信带宽窄、速率低,通信速率在kbps量级。对于深海潜航器通常对通信设备功耗都具有较高要求,可采用低频远距或中频近距离的低功耗通信技术以满足潜航器的信息交互需求。
由于水下潜航器工作环境的特殊性,基于无线电传播的罗兰C、GPS等传统导航方式在水下无法应用。拥有自主导航能力的惯性导航系统是水下导航的主要设备,但是,惯导系统内的运动传感器会发生漂移,其定位误差会随时间积累,在水下工作时间越长,惯导系统的定位精度误差越大,无法满足高精度、远航程水下潜航器的要求。水下声学导航定位系统具有误差不随时间积累的优点,但受海洋环境的影响导致定位误差的离散性大。结合惯导系统的短时高精度,通过惯导和水声导航定位技术的紧密组合,即可水下修正惯导系统误差,完成惯导系统的水下校准和重启,提高潜航器的水下隐蔽性、自主性和安全性,解决潜航器的深海高精度和远航程导航问题,为潜航器的大量应用提供强有力的技术支撑。
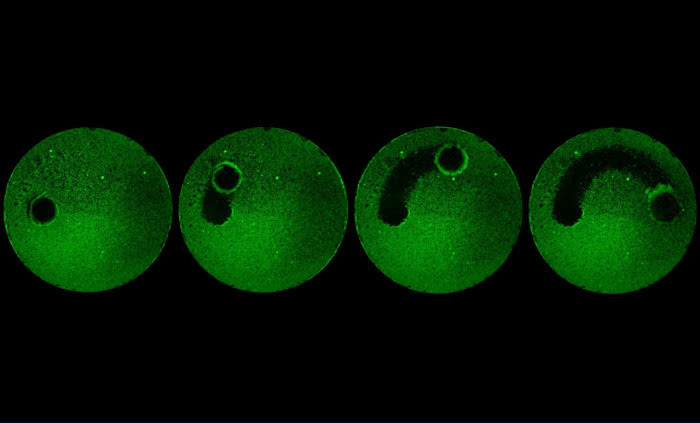
长基线水声导航定位系统定位精度高、导航单元的基阵尺寸小、安装要求低,适合潜航器平台的应用,但需要同时接收多个海底导航信标的信号。合成基线水声导航定位技术利用平台的运动构建虚拟的导航定位基阵,可以很好的解决此问题。利用长基线、合成基线水声导航定位技术结合惯性导航技术可以实现潜航器的水下亚米级导航,2015年和2016年在千岛湖进行了系统导航定位精度验证试验。
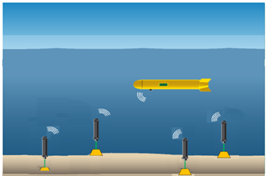
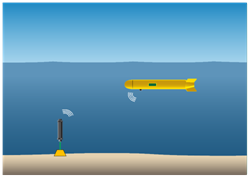
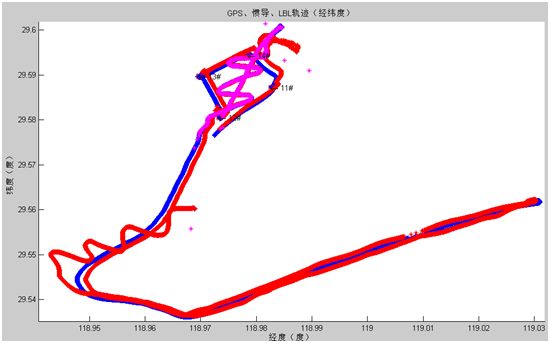
2017年在丹江口水库进行了两型潜航器的水下导航、跟踪定位和通信试验。


2017年11月,在南海布设了深海导航参考点,构建了区域导航定位、通信服务区,完成了大型平台的导航任务。
(图片来源于网络)
2018年6月在2017年布设的海区开展了AUV导航通信试验,在相邻海区又布设了一个区域高精度导航位服务区,可为潜航器深海试验提供导航定位和通信服务。
区域高精度导航定位服务区可长期为深海潜航器及其编队的长航时、长航程作业和试验提供高精度导航定位服务,解决声学导航系统用一次建设一次问题,降低作业成本;另外,也可用于深海空间站等多种复杂平台的高精度导航定位。
本文由中国科学院声学研究所东海研究站郭霖副研究员供稿。
(本文来源:中国声学学会微信公众号;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 导航定位
- 通信技术