

 我要投稿
我要投稿
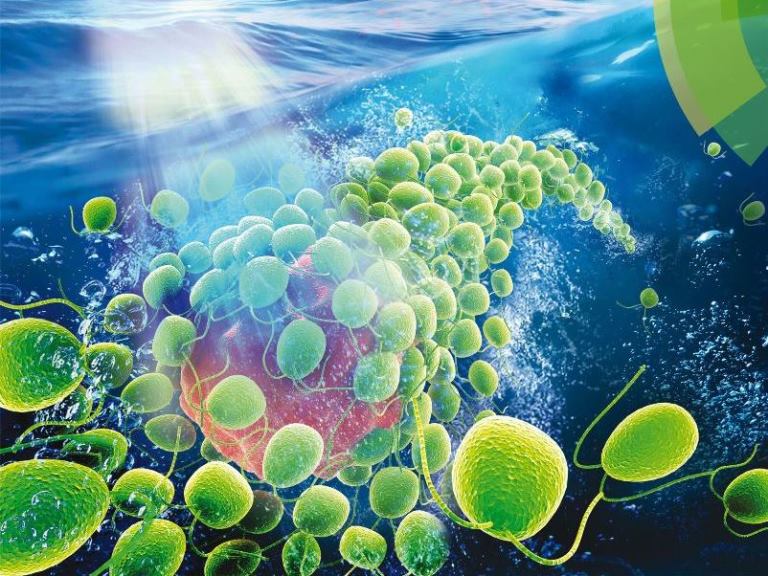
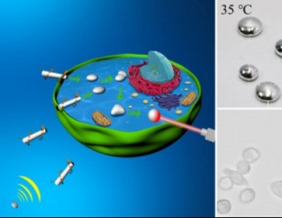
图:沈阳自动化所微纳米课题组科研成果获Soft Matter封面刊载
微纳机器人是机器人领域的前沿方向,在无创手术、药物输运、微纳制造等方面具有广泛的应用前景,吸引了全球众多科学家的研究兴趣。尽管经过数十年的发展,微纳机器人已经取得了很大的进步,但是受机器人本体尺寸、材料性能等因素的影响,微纳机器人的能源供给、驱动控制、作业灵活性等问题依然是当前面临的关键挑战。
针对上述问题,中国科学院沈阳自动化研究所微纳米课题组刘连庆研究员团队提出了一种利用生物细菌作为机器人本体,通过群体控制完成微纳作业任务的新技术。
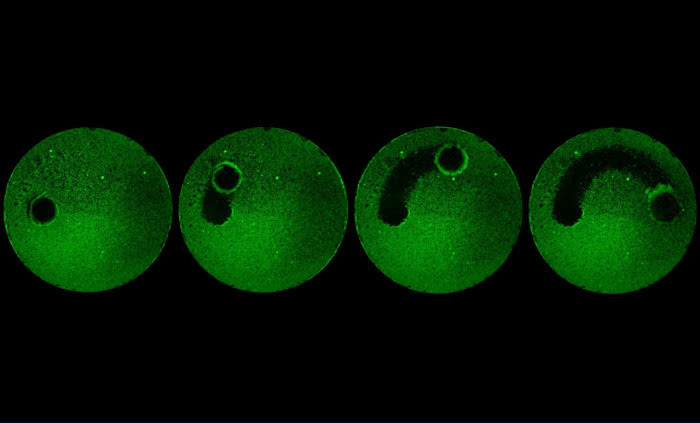
国际著名学术杂志Soft Matter封面刊载了该研究的示意图:利用具有趋光性的可游动藻类细胞作为运动可控的单体微型机器人,基于布朗运动理论对群体机器人运动产生的集群效应作用力进行理论分析和建模,通过光路的设计和光斑诱导,实现群体机器人的控制,进而完成对微小物体的准确抓取、定向移动和定点释放。由于生物细菌具备从溶液中直接高效率将化学能转换为机械能的特点,因此一定程度上解决了微小机器人的能源供给问题。同时,由于操控是依靠微型机器人群体产生的类布朗运动实现,因此该操控方法降低了对被操作物体材料和形状的要求,提升了操作的适用性、灵活性和效率。
微纳米课题组专注于纳米技术、生物技术与机电系统的融合,期望利用新的物理和生物原理,实现机器人感知、驱动和控制性能的提升。围绕上述思想,本年度先后在Scientific Reports,Bioinspiration & Biomimetics,Nanotechnology,IEEE Trans on Biomedical Engineering,Biomedical Microdevices等国际知名期刊发表系列论文,研究布局逐步系统化、体系化,为未来取得更好的成果奠定了基础。
文章链接:
Zhang C, et al, “Bio-syncretic tweezers actuated by microorganisms: modeling and analysis.“Soft Matter. 2016 Sep 28;12(36):7485-94. doi: 10.1039/c6sm01055e
刘连庆研究员简介:
中国科学院沈阳自动化研究所机器人学研究室副主任,研究员,Email:lqliu@sia.cn
个人主页:点击此处进入
研究方向:纳米机器人学,微纳生物技术,微纳制造技术,微纳检测与制造高端科学仪器与装备
(本文信息来源:中科院沈阳自动化所网站;由e科网整理编辑)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 微纳机器人









 赞 1
赞 1
 回复
回复








