我要投稿
我要投稿在自然界,数百只蚂蚁能高度协同行动搬运一件食物,其组织和相互间协同程度令人惊叹,科学家们长期以来试图用人工智能手段模仿这一过程。
德国乌尔姆大学的科研人员应用仿生学原理,研发出一种机器人蚂蚁-"BionicANTs",这种模仿蚂蚁外型的机器人长度约14厘米,部件采用激光烧结成型技术制造,体表植入微电子芯片,"蚂蚁腿"和"爪子"通过压电元件制成的执行机构进行精确快速的控制,蚂蚁的"眼睛"是3D成像装置和光学感应元件,体外安装的射频模块实现相互间的信息沟通。这种机器人蚂蚁可以模仿自然界蚂蚁的行为。据科研人员介绍,这一系统的关键是根据分散式多任务控制构架系统设计的实现了"机器人蚂蚁"之间实时连续的信息交换,而且所有参加任务的机器人蚂蚁均为独立行动,参加任务的蚂蚁数量可任意变化。
以高度集成的单系统解决共同任务
如同其自然样板一样,BionicANTs可根据明确规则进行合作。它们彼此沟通,并相互协调行动与移动。人工蚂蚁由此显示了,自主的单独组件如何在联网整体系统中共同完成复杂任务。
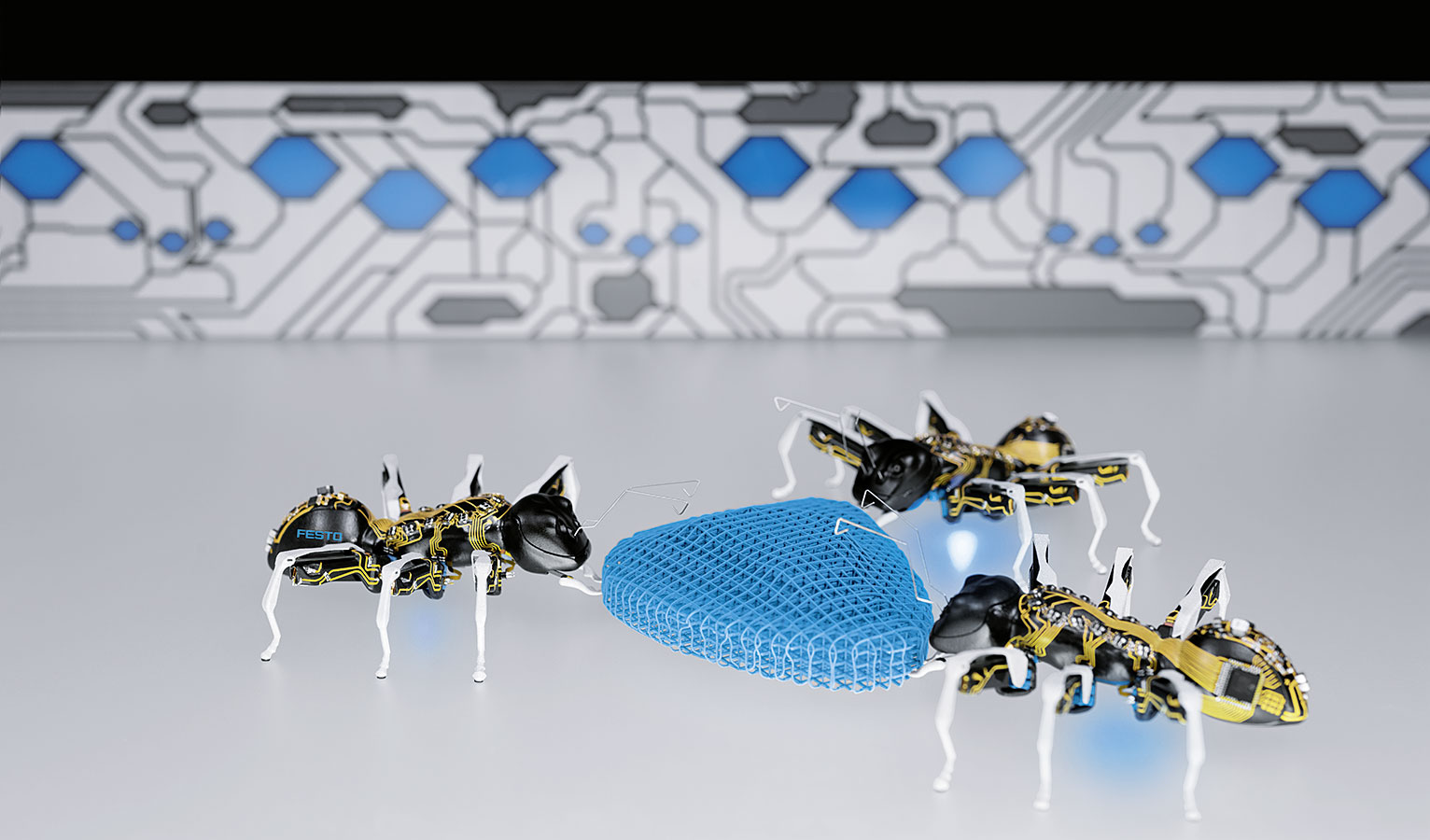
图:ANT不仅代表蚂蚁,也代表自主网络技术(Autonomous Network Technology)
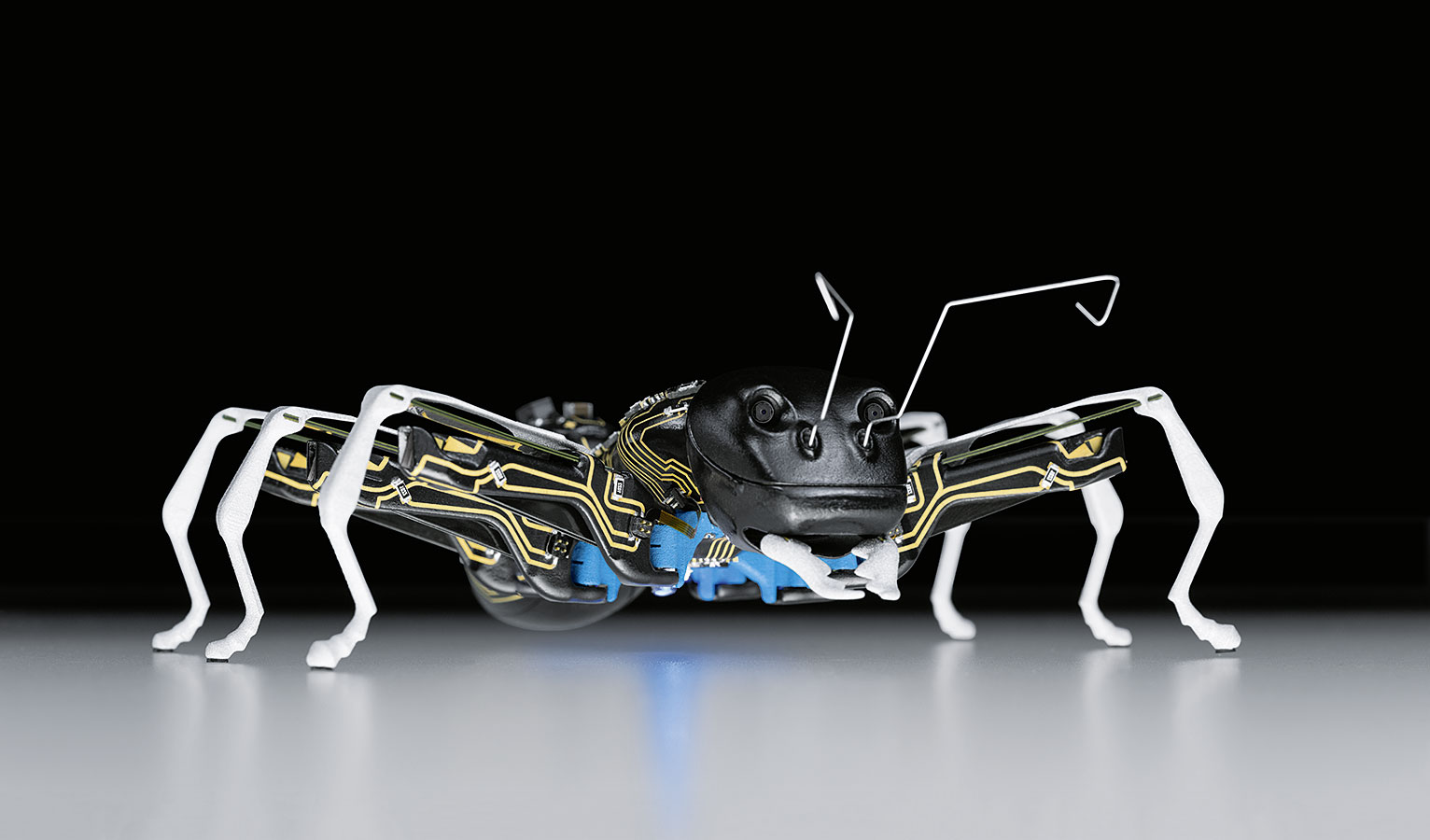
图:理想平台:全新技术试验研究载体

图:精确控制:腿部执行器中的压电陶瓷弯曲传感器

图:高度集成部件:结构和电动功能的集成

图:精确控制:腿部控制的压电陶瓷弯曲传感器
先进生产工艺与技术
不仅是人工蚂蚁的合作行为十分惊人。其制造过程同样独一无二。激光烧结部件通过3D-MID工艺以可见导体结构进行精炼。由此,这些部件可以获得结构性与电动功能。
在腿部执行器中,费斯托利用压电技术特点对弯曲传感器进行快速精确控制,传感器节能且空间需求极小。
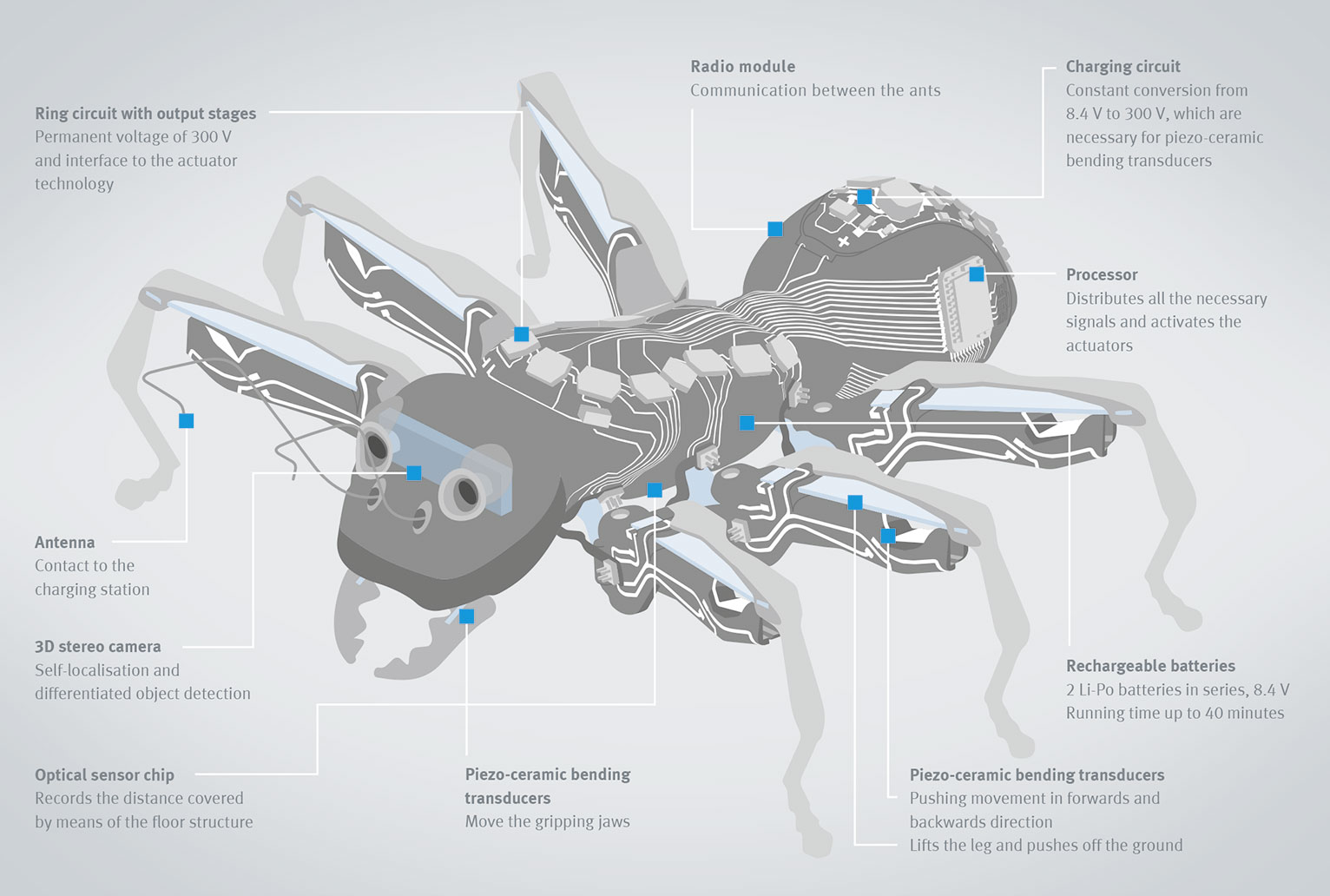
图:每个人工蚂蚁的内部都集成了众多组件,技术和功能
这一成果已在今年汉诺威工业博览会上展示。科研人员说,仿生机器人蚂蚁的意义绝不只是一个玩具,因为它实现了分散自动化系统的协同行动,这是工业4.0领域的重大课题,在其它领域也有重大应用前景。
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 协同合作
- BionicANTs