我要投稿
我要投稿自行车现在是很普通的一种交通工具。
“好马”(dandy horse)
据西方文献记载,它最早是一种如图1被称为“好马”(dandy horse)的滑行工具,前进的动力是人的脚在地上行走,还是1817年一位名叫德莱斯(Baron von Drais)的德国人发明的,取得了专利。

图1 “好马”
后来经过许多改进,直到19世纪中叶才发展到现在的模样。不过据《清朝野史大观》
记载:“黄履庄所制双轮小车一辆,长三尺余,可坐一人,不须推挽,能自行。行时,以手挽轴旁曲拐,则复行如初,随住随挽日足行八十里。”由此可见,他制造
的自行车,前后各有一个轮子,骑车人手摇轴旁曲拐,车就能前进,这是史料最早记载的自行车。可见清朝人黄履庄(1656-?)很早就发明了类似于自行车的
装置,而且不是用脚蹬而是由手摇动曲柄前进。
比黄履庄大一岁的清初词人纳兰性德(1655-1685)在他的的笔记小说《渌水亭杂识》中有一段记载:“武侯木牛流马,古有言是小车者。西人有自行车,前轮绝小,后轮绝大,以高临下之势。故平地以得自行。或即木牛流马乎。而坎曲折,大费人力也。”可见在清初,西方传教士就已经把当时西方的自行车传到中国来了。
这里说由于前轮小后轮大,能够“以高临下”所以平地能够自行的说法,从力学上是没有道理的。这在当时力学学科还不成熟,力学知识也不普及的情形下的一种蒙昧的猜想,是可以理解的。至于说到高低不平的道路上,大费人力,是可以理解的。纳兰性德提到的自行车,大约形如图2或图3,不过用链条传动的自行车,大约要到19世纪末才普遍使用。

图2前轮小而后轮大的自行车

图3最早有链条传动的自行车
现今,对于一般人来说,骑自行车是轻而易举的事情。早期的研究大多集中注意于如何加速的问题。事实已经证明,它是一种最省力最优秀的非机动交通工具。不过要讲清楚行进中的自行车为什么不倒的问题,即自行车的控制的问题,可不那么简单。
“自行车稳定性”的问题
这就是所谓的“自行车稳定性”的问题,即有两个轮子支起来的自行车,在行进时为什么居然非常稳当不会倾覆?一百多年来这项研究吸引了许多著名的力学家、物理学家乃至数学家参加,累计发表的有名的论文,包括以英、德、法、俄、意大 利扥各种语言的论文,在百篇以上,其中还有博士、硕士和学士的毕业论文,特别是1897年法国科学院,还为之设立过一次悬赏(Prix Fourneyron competition)。令人惊异的是,迄今这个问题很难说已经最后解决了。人们还在继续研究。
从1869年英国杰出的力学家、工程师和热力学家兰金(William John Macquorn Rankine,1820-1872)发表了一篇题为《自行车运动的动力学原理》(On thedynamical principles ofthe motion of velocipedes)。是讨论自行车平衡和驾驶的最早的文章。那篇文章只是半定性的讨论,对后人的影响不大。其后,茹斯(G. G. R. Routh)(1899年)、惠普耳(Francis Whipple)(1899年)[1]都相继发表论文。卡法罗(E.Carvallo)(1899-1901年提交了300页的论文,为此获得法国科学院的悬赏。其后,德国著名的物理学家索墨菲(Arnold Sommerfeld)(1910年)、德国著名数学家克莱因(Felix Klein)(1910年)、著名力学家铁木辛科和杨(Timoshenkoand Young)[2]、力学家邓哈托(J. P. Den Hartog)(1948年)都在他们的著作或论文中论及自行车的稳定性问题。在他们之后有更多的人讨论,其中有若干篇学位论文。
在1869年到1970年这一百年间发表的这许多论文,对自行车行驶的稳定性,提出了各种模型,也列出了不同类型的微分方程组。不过其中影响比较大的一种说法,就是自行车前轮的陀螺效应,以至于在许多通俗读物中都以这种观点来解释自行车的稳定性。
陀螺效应
对于陀螺效应自行车稳定性的解释。我们简要地来做说明。你拿一枚硬币,让它在平面上滚动。如果起始时刻让它略微倾斜,比方说如图4倾向左侧,你就会发现,它会向倾斜的这方拐弯,当倾斜角变得愈大时,拐弯的曲率也愈大。最后到倾倒为止。

图4滚动的硬币
现在我们把这个现象从力学上加以分析。倾斜的硬币受一个由作用在中心的重力和地面支撑力所形成力偶的作用。就是在这个力偶作用下硬币滚动才发生拐弯。现在我们把以上滚硬币的情况化归为图5。


图5 圆盘受力矩的运动示意图
令图中的圆盘为硬币,它以,圆盘的法线为OH,圆盘所受的力矩以力F与支撑处与之方向相反的力,其力矩的大小以M表示。现在用握起来的右手四指的方向表示力矩作用的旋转方向。那么伸直的拇指的方向便是圆盘法线H旋转的方向。也就是说圆盘绕Y轴以角速度ω来旋转,这就是圆盘拐弯所要求的角速度。就是说。旋转圆盘,如果不受外力矩,它会按照惯性,方向不变地转动下去,如果受一个外力矩的作用,它的转动方向会转动,其转动的方向的按照上述右手法则,而且转动的角速度ω的大小是与力矩M的大小成比例的。这就是所说的陀螺效应。
熟悉了以上的结果,我们来讨论陀螺效应如何能够使自行车行驶稳定。设在行进时自行车欲向左侧倾倒,即前轮向左倾斜,这时骑车人操纵把手使前轮向左转,这相当于给前轮一个向左旋转的力矩,在这个力矩作用下,根据右手定则,前轮会由倾斜向直立方向运动。同样如自行车欲向右倾倒,即前轮向右倾斜,这时骑车人通过把手使前轮向右转,这相当于给前轮一个向右旋转的力矩,在这个力矩作用下,根据右手定则,前轮会由倾斜向直立方向运动。由此,自行车自然会稳定地向前行驶。
无论从力学原理上来说,还是从骑车人的实际经验来看,以上自行车陀螺效应的解释都是行得通的。所以近百年中,这种观点流行比较普遍,以至于在许多科普书籍中,大半也是介绍这种观点的。不过对于这种看法,也有人提出异议。著名物理学家索墨菲说:“由车轮的构造看出,陀螺效应是很小的。如果要加强陀螺效应,就 应当尽可能用重的车轮的边缘和轮胎取代轻的。即便如此,这样弱的陀螺效应对于系统的稳定性才会有少许的贡献。”
除了陀螺效应的解释外,1948年铁木辛科和杨在他们所著的《高等动力学》一书中,还提出了另外一种解释。这就是,当自行车往一侧倾斜时,骑车人就用把手将前轮转向同一侧,由于前轮转了一 个角度,自行车的行进就沿着绕倾斜侧的圆周,这时,离心力向圆周外,就会把自行车扶正。由这个解释,可以得出结论,自行车的速度愈快,所产生的离心力便愈大。所以自行车行进的速度愈快自行车便愈容易控制。不过,这种解释与人们的经验有点差别。当人们在平地上把一辆自行车推行到一定速度并且撒手,自行车会无控制地稳定地前行一段,这时,即使在中途扰动它一下,它也能够回复稳定。这说明,自行车本身在没有驾驶的条件下便有能够稳定前行的机制。
1970年,在《今日物理》杂志上,英国人大卫·骏斯(David E.H. Jones)发表了一篇文章[3]。这篇文章对后来的研究影响很大。文章报道了作者自制了一辆没有前轮陀螺效应的自行车(图6),照样能够稳定地行驶。文章用事实证实了陀螺效应对于自行车行驶的稳定性不是主要的。

图6骏斯的无陀螺效应的自行车
骏斯的办法是,在普通自行车前轮边上,再增加一个平行的轮子,这个轮子通过传动与前轮旋转方向相反,旋转速度相同,这样从整体上说就抵消了前轮的陀螺效应。尽管这样,这辆自行车,仍然能够行驶自如没有任何困难。
既然陀螺效应不是自行车稳定前行的主要因素。而且即使没有驾驶,在一定速度之下自行车前行也是稳定的,于是就需要寻求新的使自行车稳定的因素。

图7普通自行车的构造
骏斯最后的结论,是基于我们平常的经验。当我们将自行车直立时,自行车前轮是向前而没有偏转角的。如果我们让自行车倾斜一个角度,相应地,自行车的前轮也就会随之偏转一个角度。这说明,前轮的中心高度是由自行车的倾斜角与前轮的偏转角的函数。在自行车倾斜时,前轮会偏转,以使前轮的重心(即前轮的轮心)取最低的位置。之所以能够这样,是和自行车构造中设计有一个“前轮尾迹”的长度有关,见图8。骏斯用计算机计算了前叉点(即过前轮中心水平线与前叉直线部分的延长线的交点)与自行车的倾斜角和前轮偏转角的关系。他称之为“驾驶几何”(steering geometry)。有了这个结果,就能够解释自行车行驶的稳定性问题了。
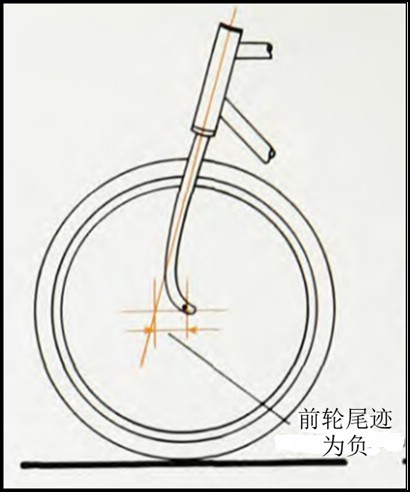
图8前轮尾迹为负的情形
原来当行驶的自行车有一个倾斜角时,自行车的前轮由于有“前轮尾迹”的缘故,会自动向倾斜的一侧产生一个偏转角,由于有这个偏转角,自行车靠转弯的离心力便会扶正。因之即使没有人驾驶,在一定的速度之下,直行的自行车,运动也是稳定的。
骏斯还研究了前轮尾迹为负的情形。这种情形下,自行车是很难于驾驶的。因为当自行车倾斜时,它的自然状态,是前轮向稳定行进所需要的反方向偏转。由此他的结 论是自行车的稳定性主要取决于“前轮尾迹”的长度,而陀螺效应只起很次要的作用。所以在设计自行车时,“前轮尾迹”的尺寸,是衡量自行车控制性能的一个很 重要的数据。
至此,你也许认为关于自行车行驶的稳定性问题,应当可以尘埃落定了。其实,事情还在发展。
到2011年,五位学者在《科学》杂志上发表了一篇文章[4]。他们论证在既没有陀螺效应也没有前轮尾迹的条件下,自行车照样可以行驶得很稳定。他们通过一个自行车的模拟品进行实验(图9A)。还是增加一个与前轮反转的辅助轮子,以消除前轮的陀螺效应(图9B)。前轮尾迹是一个很小的负值。这样的“自行车”在无人操纵的条件下,照样行驶得很稳定(图9C)。他们并且对这个模型进行了理论探讨,列出了方程组,并且讨论了它的稳定行驶范围。他们的研究说明,自行车虽然构造很简单,但在一定的质量分布情形下,实际上是一种能够自动控制其行驶稳定的交通工具。其原因既不是陀螺效应,也不是前轮尾迹。实在是妙不可言。

图9没有陀螺效应和前轮尾迹的自行车模型
人们探讨自行车的稳定性问题,已经经过了一个半世纪。咋一看来,似乎这样的探讨没有什么实用意义。因为人既然已经能够自由地驾驶自行车,自行车制造也没有提出更多的要求。这样的探求,似乎有一点书呆子的嫌疑。
不过,对于真理的探求者来说,如南朝陶弘景所 言:“一事不知,以为深耻”。对于未知的事情的寻根问底的精神,正是科学精神所在。
另一方面,自行车稳定性问题,一开始就是一个人机系统的控制稳定性的难 题。在人类实现机械化的过程中,人与机器、人与汽车、人与火车、人与飞机等等,都有一个控制稳定性的问题,而在所有这些问题中,也许人与自行车的控制问题 更具有挑战性。因为它的确看似简单而实际上却很复杂。也正因为如此,在百多年的研究的道路上,异军迭起,新意屡出。迄今,也很难说已经达到尽头。也许在继 续探求中,它会在实际应用中开出新的花朵来。
图10愉悦的自行车骑行者
参考文献
[1]F.J.W.Whipple,Thestability of the motion of bicycle,QuarterlyJournal of Pure and Applied Mathematics, 30,312(1899).
[2] Timoshenkoand Young, Advanced dynamics, McGraw-Hill Book Company, New York,1948
[3]Jones, David E. H. "Thestability of the bicycle" .Physics Today23(4): 34–40.(1970).
[4]D. G. Kooijman, J. P.Meijaard, J. M. Papadopoulos, A. Ruina, and A. L. Schwab ,A bicycle can be self-stable withoutgyroscopic or caster effects.Science332(6027): 339–342. (April 15,2011).
[5] Bicycle and motorcycle dynamics,
http://en.wikipedia.org/wiki/Bicycle_and_motorcycle_dynamics
在最后这篇维基百科词条后附有许多有价值的关于自行车研究的文献,可以自由下载。
(本文原创,小编做了微调,作者武际可老师,授权发布)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 科学趣谈
- 控制稳定性
- 自行车











 赞 1
赞 1
 回复
回复