我要投稿
我要投稿
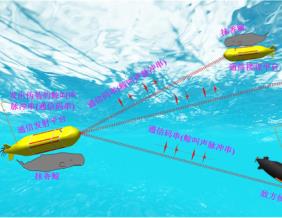
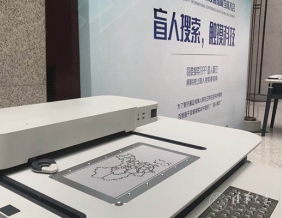
图:水下机器人普遍面临水下通信问题
由于水环境的特殊性,水下通信不像陆地上那样方便自如,其一定程度上限制了水下机器人大规模应用。传统水声通信是使用最为广泛的一种通信方法。但因其功耗高、体积大、速率慢,容易受到水体运动及周围障碍物的影响,尤其是在有限或地形复杂的水域通信时,信道多径效应明显,通信质量较差,已经很难满足日益增长的水下通信需求。
近期,北京大学工学院谢广明教授领导的课题组研制出一种新型的水下电场通信系统,为目前水下机器人通信提供了一种新思路,相关论文发表于仿生科学领域国际顶级期刊 Bioinspiration & Biomimetics。

谢广明教授领导的团队是国内较早展开水下仿生机器人相关研究的人员,强调模仿学习自然界生物特征和功能,在若干方向取得了创新性结果。为解决水下机器人的稳定通信,为日后水下机器人群体的大规模应用,谢广明团队从自然界鱼类的一种特殊行为中获得灵感,开发出了通信稳定、功耗低且对水环境要求极低的水下电场通信系统,并在机器人上进行了系统深入的实验验证。
谢广明教授及合作者经过研究发现,自然界有些鱼类如南美电鳗亚目(Gymnotiformes) 鱼和非洲管嘴鱼科(Mormyridae) 鱼,可以主动发射和感知电场实现水下通信。其工作原理为电鱼通过自身特有的发电器官发射电场信号并且释放到周围水域,由于水是良导体,该电场信号会以类电偶极子场的方式进行传播,附近的其他电鱼可以感知第一条电鱼发射的电场信号,并从中提取频率、波形及信号时间间隔等有效信息,从而解读出电场信号中蕴含的信息,实现个体间的水下通信。
从电鱼通信中得到启发,研究团队首先把电鱼通信系统抽象建模为由一对发射电偶极子和一对接收电偶极子组成的简化系统,接着对该电场系统进行数值仿真,初步掌握了其传播及分布特性,最后设计开发出了一套新型的仿生电场通信系统。研究团队对该仿生电场系统进行了深入系统地实验研究,分别对比了电场通信在静水、水流流动、有障碍物环境和自然水域中的通信性能,结果表明水中电场通信比水声通信更为稳定,水体运动、障碍物及水质等复杂环境对电场通信影响都很小。目前发射功率仅为0.25W时即可实现水下3~5米的近距离电场通信,增加发射功率和电极间距可进一步提高通信距离,未来具有较大应用前景。
论文的通讯作者为谢广明教授,第一作者为谢广明课题组的博士王伟(目前在美国麻省理工学院机器人研究所做博士后研究)。该工作得到了国家自然科学基金等项目的资助。项目合作者还包括德国汉堡大学的Jianwei Zhang教授,英国帝国理工大学的Jindong Liu教授以及北京航空航天大学的文力教授。
文章链接:
W. Wang, J. Liu, G. Xie, L. Wen, and J. Zhang, “A Bio-inspired Electrocommunication System for Small Underwater Robots”, Bioinspiration & Biomimetics, 12, 036002, 2017
(本文来源:北京大学新闻网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 水下通信系统
- 水下机器人