我要投稿
我要投稿古希腊哲学家亚里士多德在《动物的历史》一书中对壁虎卓越的攀爬能力进行了描述。近年研究发现壁虎的攀爬能力主要源于脚掌多等级刚毛结构与壁面间的范德华力作用,通过脚趾卷入和卷出可以控制强黏附和易脱附。由于范德华力在自然界中普遍存在,仿壁虎干黏附表面不但可用于大气环境下的爬壁机器人、夹持器等,还可以拓展到空间环境的应用,如宇航员手套、空间垃圾回收、空间驻留平台维护机器人等。
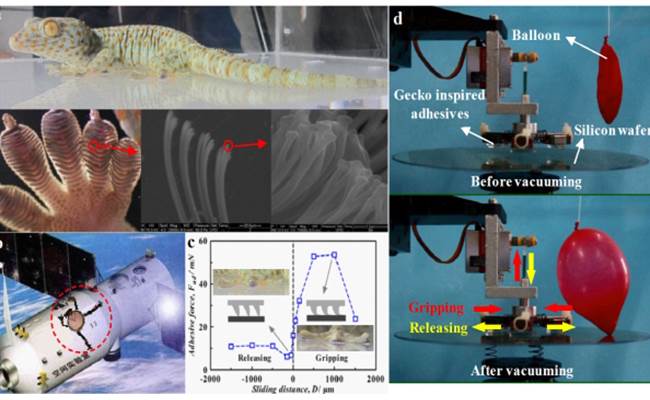
图:(a) 壁虎及脚掌刚毛;(b)航天器外表巡查机器人概念图(红色圆圈内);(c)真空下仿生表面黏附力随剪切的变化;(d)用气球展示真空环境的黏附表面夹持器晶元转移。
目前,仿生黏附表面主要用刻蚀-浇铸和气相生长法,操作复杂、成本高。清华大学机械系摩擦学国家重点实验室田煜教授课题组与李勇教授课题组合作提出基于超精密金刚石切削来加工仿壁虎表面模具,通过简单脱模制备了性能优良的楔形阵列仿壁虎表面。基于该楔形仿壁虎表面制作的夹持机构成功地实现了对大气/真空中晶元的拾取、转移和释放。研究提出了一种绿色、可靠、高性价比的制备仿壁虎干黏附功能表面的方法,有望促进仿壁虎表面在爬壁机器人黏附足、真空夹持器以及空间黏附器件等方面的应用。相关研究成果于4月7日以《使用超精密金刚石切削技术制备仿壁虎可控黏/脱附表面》为题发表在《先进功能材料》上。
文章链接:
Dashuai Tao, et al, "Controllable Anisotropic Dry Adhesion in Vacuum: Gecko Inspired Wedged Surface Fabricated with Ultraprecision Diamond Cutting," Advanced Functional Materials, DOI: 10.1002/adfm.201606576
(本文来源:清华新闻网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 清华大学
- 范德华力