我要投稿
我要投稿近日,中国科学技术大学数学学院国家数学与交叉科学中心(合肥)图形与几何计算实验室在机器人空间3D打印方面取得了重要研究突破,成功实现了六轴机器臂空间3D打印线框模型的路径规划算法设计及高效自动打印。
该研究成果已被计算机图形学领域顶级会议Siggraph Asia 2016接收,即将于12月初在大会上报告,论文发表在计算机图形学领域唯一的一区期刊ACM Transactions on Graphic上(第一作者与通讯作者均为中国科大)。
三维线框模型是由一系列直杆通过节点连接而成的空间结构。由于其蕴含空间形状的简洁性,这种模型被广泛应用在各种领域,比如艺术品、家具装饰、雕塑、建筑等,如下图所示。

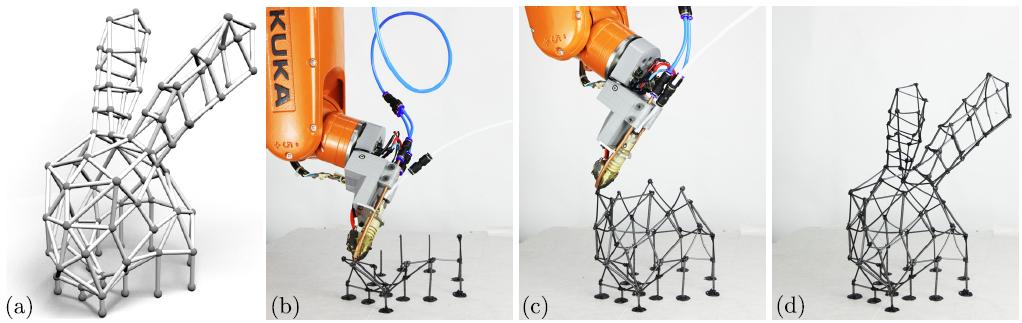
因此,通过3D打印来制造各种复杂的线框模型逐渐在艺术及建筑领域中有越来越多的需求。由于线框模型的自然性,通过机器人直接在空间输出直杆,从而自动生 成整个线框模型成为更为自然的方法。如何实现打印任意复杂结构的线框模型的路径规划成为一个急需解决的问题。为了解决此问题,研究小组提出了一种“分而治 之”的策略,首先将输入三维线框模型分解成多个规模较小的子问题,然后对每个子问题设计了一种局部优化的策略进行路径规划。所设计的打印路径既能保证打印 过程中已打印部分的稳定性,同时也避免了机器臂与已打印部分的碰撞,如下图所示。
该项目的负责人为中国科大数学学院的刘利刚老师和张举勇老师。值得指出的是,本研究项目的主要参与人为我校三名本科生,其中第一作者黄一江为我校数学学院
2016届毕业生,现已前往麻省理工学院继续深造,胡馨现为我校计算机学院大四本科生,宋果鲜为我校数学学院2016届毕业生。
该项目的成员还包括清华建筑系的学生以及鲁迅美术学院的学生。该项目很好体现了数学、计算机、艺术与建筑的跨界合作。此工作得到了国家重点研发计划、中科院“百人计划”和国家自然科学基金的支持。
文章链接:
Yijiang Huang, et al, "FrameFab: Robotic Fabrication of Frame Shapes," ACM Transactions on Graphics(SIGGRAPH Asia) 35(6), 2016.
刘利刚教授简介:
中国科学技术大学计算与应用数学系教授,Email:lgliu@ustc.edu.cn
个人主页:点击此处进入
研究方向:计算机图形学和图像处理。
张举勇副教授简介:
中国科学技术大学计算与应用数学系副教授,Email:juyong@ustc.edu.cn
个人主页:点击此处进入
研究方向:计算机图形学,计算机视觉,数字图像处理,数值最优化等。
(本文来源:中国科学技术大学数学学院;由e科网整理编辑)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 空间3D打印
- 路径规划