我要投稿
我要投稿

清华新闻网7月14日电 7月12日,清华大学计算机系2012级博士生刘晓龙(导师:邓志东)提出了一种带特征增强与聚合的膨胀型卷积神经网络模型(DFFA),在自动驾驶领域国际著名的KITTI 道路/车道(Road/Lane)检测评测任务中,获得车道估计评测(Lane Estimation Evaluation)与行为评测(Behaviour Evaluation)两项第一,同时还获得了城区无标线道路(UU_ROAD)可行驶路面检测任务第二名。
这是由邓志东教授带领的课题组一年内再次在国际自动驾驶KITTI评测竞赛中获得佳绩。2016年12月,邓志东教授团队已在KITTI国际测评中取得了城区有标线道路(UM_ROAD)和城区无标线道路(UU_ROAD)两项任务的冠军。这两项评测任务集中了斯坦福大学、卡耐基·梅隆大学、多伦多大学、德国弗赖堡大学等全球80多个顶尖国际研究团队参与竞争。
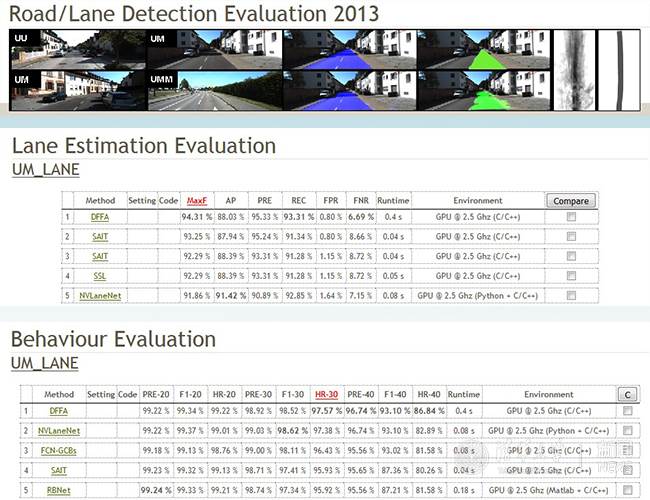
图:带特征增强与聚合的膨胀型卷积神经网络模型(DFFA)在KITTI国际测评中取得城区有标线道路(UM_ROAD)和城区无标线道路(UU_ROAD)两项任务的冠军。
KITTI数据集由德国卡尔斯鲁厄理工学院和芝加哥丰田技术研究所联合创建,是自动驾驶领域中利用真实道路与交通数据,对计算机视觉算法进行评估的国际公认最具权威性的开放性评测平台,评测性能由KITTI全球发布并在网站上自动公开测试性能指标与团队名次,具有客观性和广泛认受性,对人工智能与自动驾驶技术与产业的发展具有极其重要的意义。
目前邓志东团队已在KITTI上保持了二项第一,三项第二的优秀成绩,包括城区有标线道路(UM_ROAD)任务中的第二名(带金字塔池化的残差网络·RPP模型,计算机系2012级博士生刘晓龙)和立体视觉评测(Stereo Evaluation 2012)中惟一的视差回归任务中的第二名(多粒度全卷积神经网络·MG-FCN模型,计算机系2013级博士生杨国润),该项任务共有95支国际团队参与评测。
近年来随着新一轮人工智能的复兴,邓志东团队利用在自动驾驶多年的研发积累,已在该领域顶级的国际期刊与国际会议发表论文,例如国际电气与电子工程师学会(IEEE)智能交通系统汇刊(IEEE Trans. on Intelligent Transportation Systems),欧洲计算机视觉国际会议 (ECCV),国际电气与电子工程师学会智能交通系统国际会议(IEEE ITSC),IEEE智能车辆国际会议(IEEE IV)等。此外,该课题组近期通过采集北京市城区的真实道路交通大数据,构建了一个面向路面交通标识检测与识别的开放式数据库(TRoM),这是在自动驾驶领域全球首次建立的此种类型数据库,可用于各种计算机视觉算法的公开评测。
(本文来源:清华大学新闻网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 清华大学
- 自动驾驶