我要投稿
我要投稿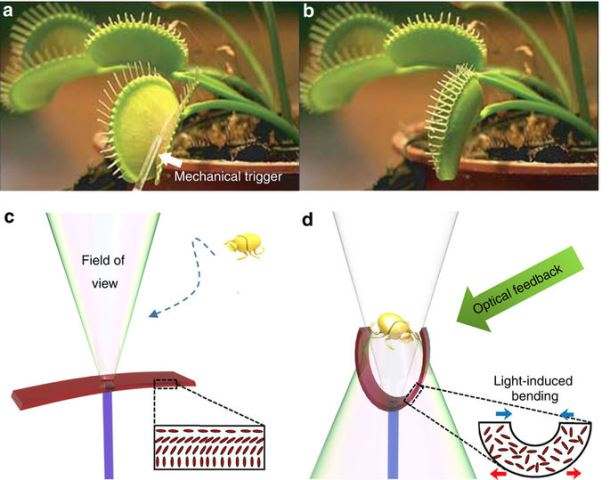
编者按:本文来自微信公众号"蓝海星智库"(ID:SICC_LHX),e科网经授权发布。
芬兰坦佩雷理工大学的研究团队研发出一种模仿捕蝇草的柔性抓取工具,这种工具能自动感知并抓取物体,开辟了一种小型自主设备发展的技术途径。
利用仿生原理开发微型机器人取得了显著的技术进展,但使微型仿生机器人自主行动和自主感知环境变化仍是重大难题。研究人员受捕蝇草的启发,将光响应液晶弹性体(LCE)薄膜作为致动器材料,这种材料可在特定波长、强度、偏振光作用下产生巨大形变;为降低对外部光源的需求,将LCE致动器安装在光纤末端,由光纤发光照射物体,通过物体反光刺激LCE发生形变,抓取目标。由于物体对光的反射/散射特性不同,柔性抓取工具可对不同被抓取物体产生不同响应。
新的柔性抓取工具能够抓取质量为其自重几百倍的物体,停止光照后物体即被释放,且可循环工作,为自主智能微机器人的发展提供了新的思路。这种采用光反射/散射诱导机理的技术也为反馈型致动器提供了一种新的技术途径。
文章链接:
Owies M. Wani,Hao Zeng &Arri Priimagi, "A light-driven artificial flytrap," Nature Communications 8, Article number: 15546 (2017), doi:10.1038/ncomms15546
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 软体机器人