我要投稿
我要投稿网易科技讯 5月4日消息,据Futurism报道,对于人类来说,特别是从事制造业工作的人,打个结、剥离电缆线外皮、将销子插入孔中或使用钻头工具等行为都很常见。它们看起来似乎都很简单,但同样需要使用灵活的双手和手指完成相当复杂的动作。
尽管机器人正越来越多地参加到工厂的生产过程中,并被广泛用于从事其他类型的工作,包括服务行业和健康医疗行业,但它们的灵活敏捷程度却没给人留下深刻印象。自从50多年前,人类将机器人带到汽车工厂中,我们已经建造了许多从事焊接、喷漆以及组装零部件的机器人。今天最好的机器手甚至可拣选它们熟悉的物品,然后将它们搬到其他地方,例如从仓库储藏箱中取出产品,让后将它们放进盒子里。
但是机器人依然无法正确定位手上的工具,比如说将十字头螺丝刀对准螺母上的凹槽,或将锤子对准钉子砸下。它们也无法同时使用双手从事复杂的工作,比如更换遥控器中的电池。与之相比,人类的双手却非常擅长做这些工作。要想机器人的手能像人类那样轻松胜任日常工作,它们需要变得更加灵活、可靠以及有力,同时也要能够进行更精确的感应,以进行更精细的移动。它们首先需要搞清楚目标,以及如何能够更好地抓握目标。对于那些能够与人类并肩协作的机器人来说,我们必须搞清楚机器人如何能够帮助我们,特别是我们觉得2只手不够用的时候。
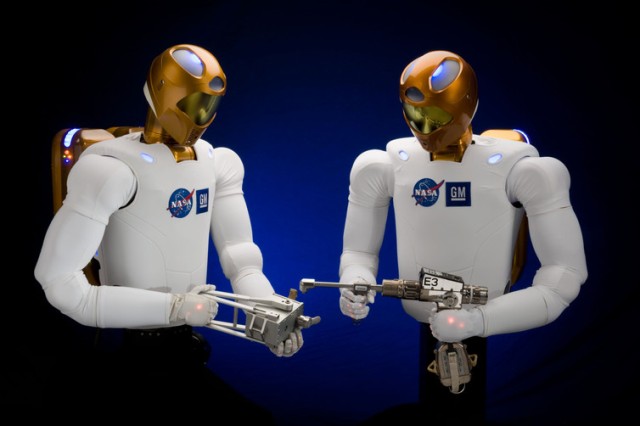
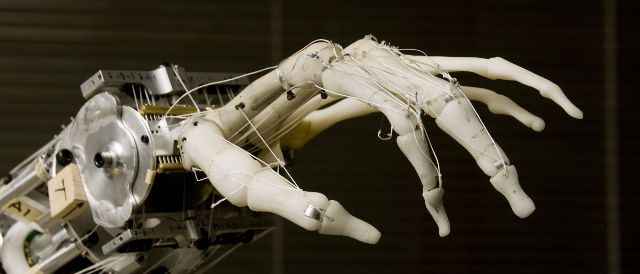
图:美国宇航局(NASA)Valkyrie的类人机器人
美国东北大学的研究团队正从事此类研究,打造类似美国宇航局(NASA)Valkyrie的类人机器人。Valkyrie的每只手拥有3根手指和1根大拇指。每个手指上都有关节状的关节,每只手都有可轻松转动的手腕。研究人员正将手臂、手腕、手指以及拇指动作整合起来,共同完成某项任务,比如以圆圈状态使用扳手以便拧紧螺丝,或将推车从1个地方推到其他地方。
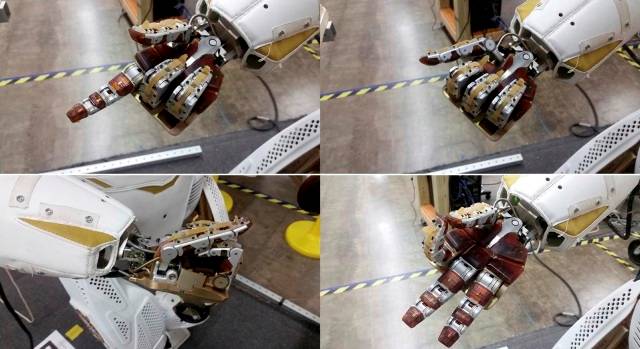
图:Valkyrie机器人的手指
我们不需要为执行特定任务而特别设计某种机器人,而是要设计多用途机器人,或称为“通用能力机器人”,它们几乎可以执行任何任务。这类机器人成功的关键在于,它们需要拥有一双卓越的手。东北大学的研究重点是设计新型自适应机器人手,它们能够执行精密动作,还能自动抓握。当机器人能够捶打钉子、更换电池以及完成类似动作时,我们就可以打造出像人手那样灵活的机器人手。要想实现这个目标,还需要发明新的设计,以便将硬元素和软元素相结合,比如人类骨骼赋予双手抓握的力量,皮肤分散压力以确保酒杯不会碎裂等。
现代技术进步正让开发过程变得更容易。有了3D打印技术支持,我们可以非常快速地制造出原型。我们甚至可使用低成本的一次性部件尝试不同的机制安排,比如2根或3根手指进行简单采摘任务,或利用拟人化机器人手进行更精细的操作。通过视觉和本体感受能力,这些能力已经成为人类的本能。
而当我们能在机器人身上使用它们时,它们就能够做更多事情,比如感知抓握力道是否太大、挤压物体是否太狠等。随着电子摄像头和传感器体积越来越小,我们也可以利用新的方式将它们整合。举例来说,如果我们按下机器人手上的传感器和摄像头,它们会向机器人控制器发送反馈,以确定抓握是否安全,或某些东西是否开始滑落。将来,机器人手或许能够感受到物体的滑落方向,以便能再次抓紧目标物体。
另一个具有里程碑意义的研究将是寻找新的方法,让机器人搞清楚其手需要实时作出哪些动作,包括时刻感受手里的情况。如果机器人手能够探测到其正抓握的物体发生的改变,或在抓握物体时对其进行操作,它们就可以帮助完成常见的手工工作,比如打结和剥电线。
双手协作可提供更多帮助,它能显著提高效率,特别是用在制造业。能够双手操作钻头或单手传递机器零部件的机器人属于巨大进步,允许工厂自动化生产过程的更多步骤。人类还没有开发出类似系统,但在可预见的未来,研究人员、技术人员以及创新人员将竭尽全力研发类人自动机器人。但这不会减缓制造业领域正在进行的机器人革命,因为当前的生产过程还有大量自动化空间,以改善安全、速度以及质量。随着机器人变得越来越完美,它们将成为人类真正的助手。
推荐阅读:
(本文来源:网易科技;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 机器人