我要投稿
我要投稿
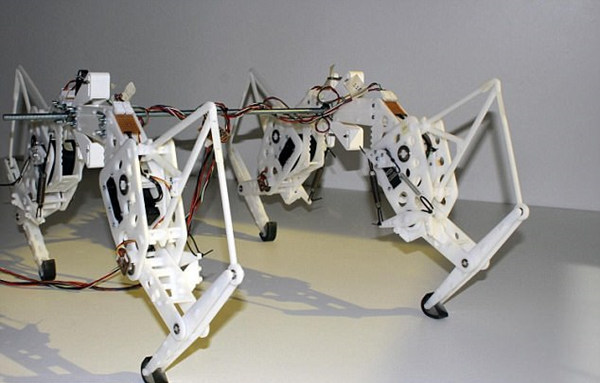
据报道,荷兰特文特大学研究员Geert Folkertsma及其团队从印度豹中获取灵感,通过模仿其运动和储存能量的方式,制造了一个能快速移动的节能机器人。
该机器人重2.5千克、长30厘米,比真实的印度豹轻20倍、短4倍,而它使用的能量仅比印度豹多15%。现在,它每小时能移动1千米。
该团队之所以选择从印度豹中获取灵感,是因为印度豹行动敏捷,这是步行机器人所缺少的特点。印度豹之所以能高效运动、快速奔跑跳跃,关键因素是它的脊柱。因此,脊柱是印度豹机器人和现有步行机器人之间的主要区别。印度豹能在肌肉内储存大量能量。因此,该团队将精挑细选的弹簧安在机器人的腿上,从而达到储存能量的效果。
这一研究有利于机器人的未来发展,也可以在像医疗保健和家务劳动这样的领域为人们提供帮助,还可以用于打造康复机器人和高级假肢。
Folkertsma解释说,印度豹或许是你能想到的最快的陆地动物,它能有效地利用自己的能量。他的机器人不是完全重造一个真实的印度豹,只是一个看起来由肌肉和关节组成的骨架,使它能像印度豹那么快,并希望将其应用到未来机器人的发展中。机器人在我们的日常生活中发挥着越来越重要的作用,因此我们需要研发可以走路、可以高效移动的机器人。
(本文来源:环球网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 四腿机器人