我要投稿
我要投稿
仿生软体机器人现已成为机器人领域的一大热门。相比于传统的硬质机器人,软体机器人能够任意改变自身形状、抵抗外界冲击,从而具有更好的环境适应性。但软体机器人目前也面临着动力弱、速度慢、控制难和无法独立供能等技术挑战。
近日,浙江大学航空航天学院、浙江省软体机器人与智能器件研究重点实验室李铁风副教授和黄志龙教授课题组在软体水下机器人方面取得重要进展,开发出一款高性能软体仿生机器鱼,并在《Science Advances》杂志上发表题为“Fast-moving soft electronic fish”的论文。
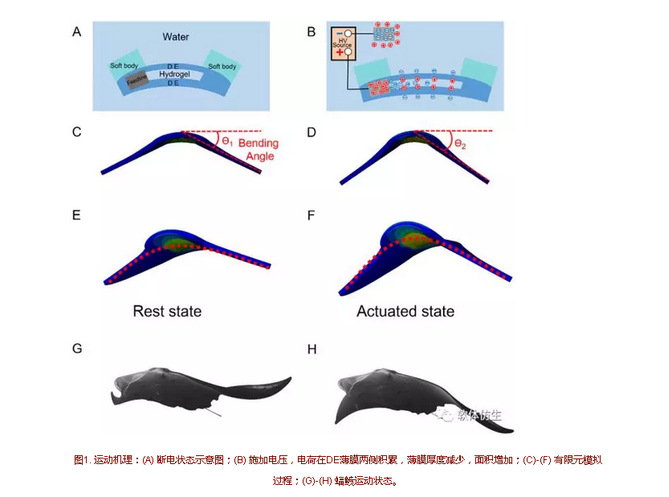
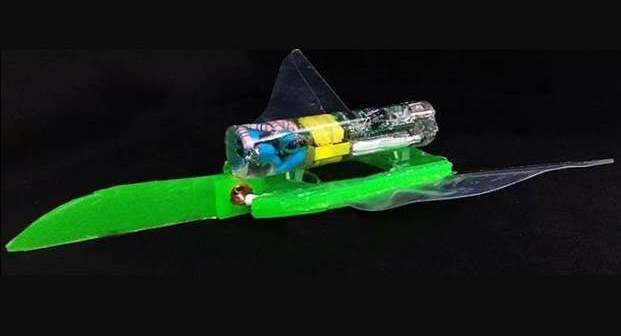
该软体机器鱼(总重量90g,身长9.3cm)从海洋生物鳐鱼(蝠鲼)的柔软身体与柔性扑翼推进获得启发,利用介电高弹体薄膜作为软体人工肌肉驱动器。介电高弹体是一种典型的电响应聚合物,在外加电场下作用下,介电高弹聚合物可以产生大变形,具有高弹性能密度、短反应时间、高效率等优点。当在介电弹性体上施加薄膜厚度方向的电压时,介电高弹聚合物薄膜会减小厚度,扩大面积。该软体机器鱼是通过介电高弹体薄膜对交流电压的响应,将薄膜张力变化转化为机器鱼的扑动,从而通过柔性鳍获得水动力。
该机器鱼采用高弹体骨架为身体以及扑翼结构提供支撑,具有极高程度的软体化和透明化。机器鱼通过电压驱动控制,依靠自身携带的小型化高压电源和控制系统,突破性地实现了快速机动性(最大运动速度为6cm/s)和长时续航(在450mAh的锂电池供能下运动3小时)。
此外,软体化、透明化的特性还可以大大提高机器鱼的环境适应效果,保证它可以更容易、安全地通过狭窄区域。紧凑的全软体结构设计,还使得其主要结构可利用三维打印技术直接成型。
该机器鱼能够很好地适应水温环境,可以在冰水混合物和温度高达74℃的水中运动,使其能够很好地用于水下探测、侦查以及海洋环境与生物信息监测。
据了解,该项目受到国家自然科学基金、中国科协青年人才托举工程、浙江省软体机器人与智能器件研究重点实验室、浙江大学机器人与智能装备科技联盟以及浙江大学柔性电子科技联盟的资助。
文章链接:
Tiefeng Li, et al, "Fast-moving soft electronic fish," Science Advances 05 Apr 2017: Vol. 3, no. 4, e1602045, DOI: 10.1126/sciadv.1602045
(本文来源:浙江大学新闻网;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 浙江大学
- 软体机器人