我要投稿
我要投稿
我们已经见识过许多版本的“触敏电子皮肤”,它们可以为机器人或义肢带来“敏感性”上的加成,但多数专注于“皮肤”本身,而忽略了“触感”。
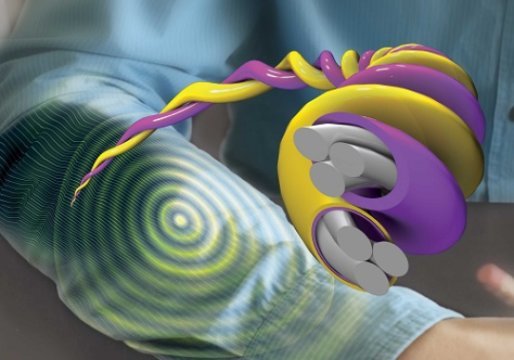
好消息是,哈尔滨工业大学复合材料与结构研究所的科学家们选择了一条不同的发展道路,打造出了一种突出于弹性皮肤的毛发状传感器阵列。这种微型传感器由压敏(玻璃包覆)的钴基微丝制作而成,可以替代自然皮肤上的体毛。相关论文已经发表在近日出版的《美国化学协会-应用材料和界面》期刊上。
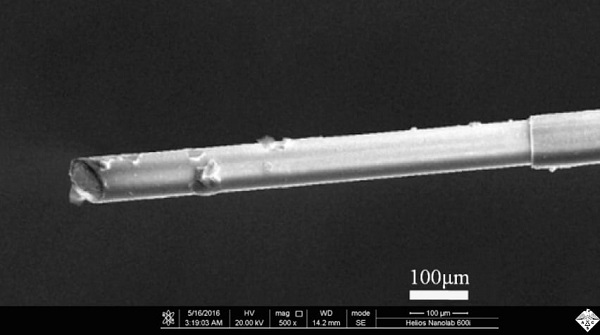
图:哈工大研发电子体毛,触敏电子皮肤
这些磁性微丝有一端扎入了硅橡胶层中,并与底下的电路板相连;另一端则透过了橡胶层,这点与自然的皮肤还是有很大的不同。
在实验室测试中,这些传感器可以感知到多种刺激,比如微风、或者一只苍蝇的降落。而如果配合两指机器人来抓取一块塑料片,它还能够感知材料的光滑度和摩擦力。
这项技术有望在许多实际领域投入使用,比如让机器人更轻柔地抓取物品,并在感知即将滑脱时抓得更紧。
文章链接:
Jian Zhang, et al, "Biomimic Hairy Skin Tactile Sensor Based on Ferromagnetic Microwires," ACS Appl. Mater. Interfaces, 2016, 8 (49), pp 33848–33855, DOI: 10.1021/acsami.6b14236
(本文来源:cnbeta.com;)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 哈工大
- 电子体毛
- 机器人