我要投稿
我要投稿
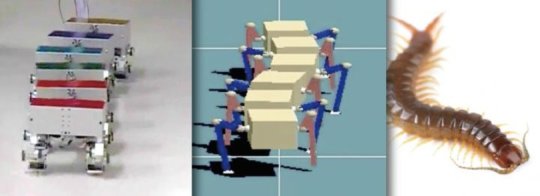
图:为什么蜈蚣爬行这么敏捷?日科学家结合模拟和机器人揭示了这一现象。
蜈蚣是一种多足类节肢动物,多只脚在地面爬行对灵活行动本应该是一种障碍,但实际上蜈蚣爬行却非常敏捷。长期以来,对蜈蚣这种多足敏捷爬行的机制研究不多,人们也不清楚其中奥秘。
据新华社东京消息,日本京都大学研究人员最新发明一种类似蜈蚣的多节多足机器人,并通过对机器人运动的研究揭开了蜈蚣能够灵敏活动的一些秘密。
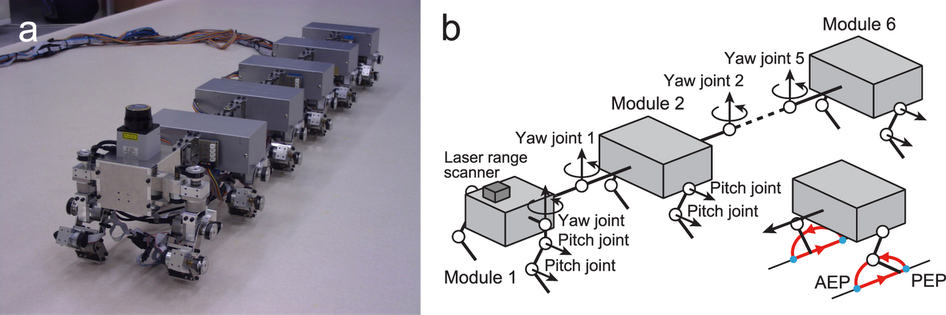
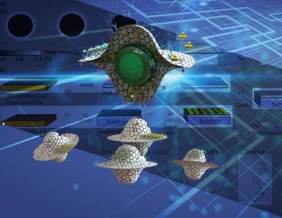
图:蜈蚣机器人和模拟示意图
京都大学一个研究小组制造了一个长约135厘米、有6个体节的蜈蚣形机器人,每个体节之间用弹簧连接。研究人员分析了使用不同弹性的弹簧时这个机器人的转向动作。结果发现,使用弹性较差的弹簧连接体节时,蜈蚣机器人的直行性能很好,但在变换行进方向时更费时间,只能在较大范围回旋;而使用弹性较好的弹簧连接体节时,蜈蚣机器人能够轻易转换方向,回旋也更为流畅自如。
研究人员借助数学模型分析蜈蚣机器人的运动,认为蜈蚣在运动中通过牺牲直线前行的稳定性来获得急回旋这样的敏捷活动能力,这反映了蜈蚣的一种极佳的行动战略。
研究结果认为,利用机器人和数学模型有望为研究生物未知的巧妙运动技能提供新的方法,也有助于为高操控性多足机器人开发简单控制系统。
文献链接:
Shinya Aoi, et al. "Advantage of straight walk instability in turning maneuver of multilegged locomotion: a robotics approach. " Scientific Reports, 2016; 6: 30199 DOI: 10.1038/srep30199
(本文文字来源:新华社;作者:华义)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 机器人











 赞 2
赞 2
 回复
回复