

 我要投稿
我要投稿

麻省理工学院(MIT)在计算机科学和人工智能方面有着深厚的积累,从早期的理论到后来的实践,MIT走过了大半个世纪。2003年,MIT将计算机科学研究和人工智能实验室合并,成立了计算机科学与人工智能实验室(CSAIL)。CSAIL是麻省理工学院最大的实验室,研究领域涉及电气工程,计算机科学,数学,航空航天,脑和认知科学,机械工程,媒体艺术与科学,以及地球,大气和行星科学部门,和哈佛 - 麻省理工学院卫生科学与技术。随着数百个不同的项目上工作的约50个研究组,CSAIL研究人员都集中在寻找创新办法,使系统和设备运行更快,更好,更安全,更方便,更有效地造福人类。他们的研究领域主要包括以下三个:
1、人工智能 - 我们寻求理解和发展使人与机器都能便于理解的推理,感知和行为的人工系统。
2、系统 - 我们从软硬件两方面寻求拥有新的原则,模型,指标的电脑系统。
3、理论 - 我们寻求对数学在计算中的广泛性,实时性。
CSAIL实验室近期研究进展:
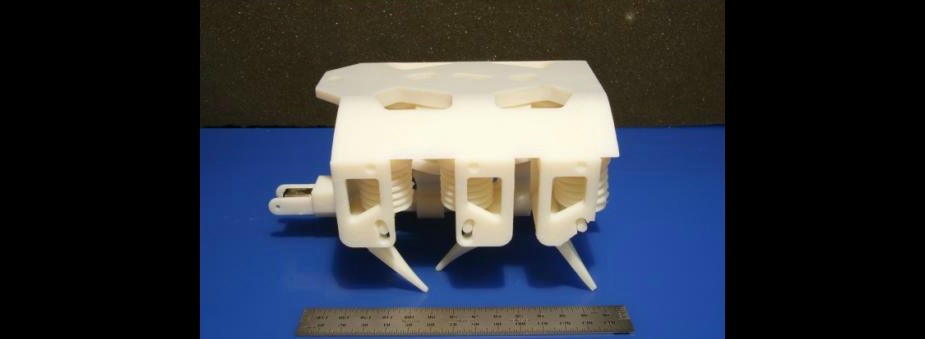
麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员就在3D打印机器人领域取得新突破。根据近期发表的论文,该团队利用创新的3D打印技术一次性打印出可行走的机器人。这一机器人只需简单地装入电池和马达即可活动。这一新的打印技术利用了麻省理工学院所谓的“可打印液压装置”。该团队希望利用这一突破快速制造出可运行的机器。研究人员使用了Inkjet 3D打印机,这一打印机支持不到发丝直径一半的打印材料。在打印过程中,打印机将光敏聚合物材料打印在模具表面,随后使用紫外光去硬化,同时维持一定的液体部分。
近日,麻省理工学院计算机科学和人工智能实验室的研究人员希望使用软件实现在任何智能手机应用眼球追踪技术。他们的最新眼球追踪系统将在6月28日举行的计算机视觉与模式识别大会进行宣讲。除了使现有的眼球追踪技术更容易使用,该系统也可以作为新的计算机界面用来发现早期的神经系统疾病或精神疾病的迹象。
在今年五月的国际机器人与自动化会议上,来自麻省理工学院的计算机科学与人工智能实验室研究人员将展示他们研发的一种新的红外深度感应系统,该系统是将10美元激光反射器连接到智能手机打造而成的。该系统既可以在室内使用也可以在室外使用。研究人员表示,使用廉价的内置红外激光器的手机可以进一步应用到个人车辆,如高尔夫球车或轮椅,以帮助它们实现自动驾驶。该系统也可以内置于小型自主机器人,像亚马逊的包裹递送无人机,使用该系统可以避免在不可预知的环境下使用昂贵的激光测距仪,成本费用将大大降低。
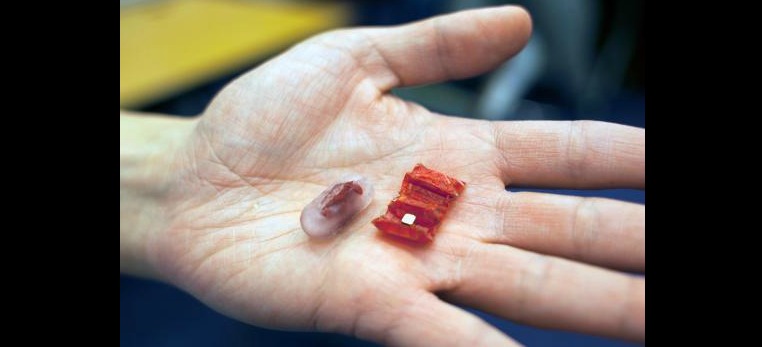
图:可食用折叠机器人
每年有数千名的孩子不小心吞下玩具、手表、计算器、电池和其他常见的家居产品中的微型燃料电池,造成肠胃组织损伤。MIT CSAIL、谢菲尔德大学、东京工业大学研究人员联合研发的可食用折叠机器人,由猪大肠制作,可装于胶囊内直接吞食,无需手术便可移走误吞食的纽扣电池,也能够用来修补胃部伤口、递送药物。
机器人由两部分组成:一部分是叫做Biolefin的可生物降解的收缩包裹,另一部分是用来制作香肠的肠衣。当Biolefin被加热时,可折叠机器人就会收缩,便于使用者吞咽,顺利进入肠胃。在机器人的棱角褶皱中有一块由外部操控的小磁铁,可粘附体内的电池等异物,帮助它们通过消化系统排出体外。
这项技术的最初发明者是来自MIT CSAIL被称为人工智能女王的——Daniela Rus教授。经过五年尝试改进,她和她的团队终于有了今天这款机器人。

图:MIT的DARPA挑战赛机器人
2011年日本地震引发的海啸波及福岛第一核电站,救援工作难以开展,日本政府和民众希望机器人能带代替人类在核辐射环境中实施搜索营救。可令人失望的是,最终没有一个机器人能担此重任。
这次惨痛的经历促成了DARPA机器人挑战赛的诞生。机器人挑战赛于2012年由美国国防部高级研究计划局(DARPA)启动,2015年决赛。决赛设置了开车、下车、开门、扭阀门、操作钻孔机、黑箱任务、爬过或清除障碍物以及爬楼梯八项任务,每完成一项任务得一分,得分多且用时短者获胜,比赛场景的设计灵感就来自于2011年的那场灾难。
MIT参赛团队在 MIT CSAIL和其他多个学院共同支持下,基于Atlas打造出了具备高水准自主运作能力的、6英尺高、400磅重的机器人。机器人可以完成爬楼、开门、驾车等一些列动作,最后在20多个决赛队伍中,排名第六,在使用Atlas机器人的队伍中排名第二。
隔墙识人——RF捕捉技术
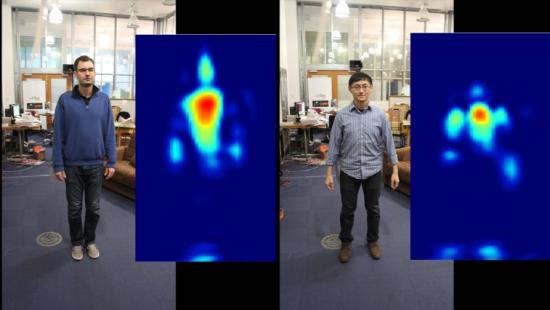
图:RF捕捉技术
RF捕捉技术通过无限信号将碎片化的反应信号在显示屏上还原成人的形状,可以辨认墙后15种不同的人的轮廓和动态,准确率达到90%。 该技术可以广泛用于智能家居、看护护理、消防救援等领域。借此,消防员不必冒险进入火场就能预先判断建筑物内是否有被困者;智能家居通过捕捉主人身处哪个房间,就能对室内暖气或者其他家电做出相应调控。
智能抓取——3D打印软抓手

图:3D打印软抓手
CSAIL开发的3D打印软抓手颠覆了人们对传统机械手的认知,它能够在保证不会造成任何损坏的前提下,轻松地拿起不同重量和尺寸的物体,比如毛绒玩具、鸡蛋或者一张纸。软抓手由三个独立的3D打印“手指”组成,上面传感器用于辨别抓取对象的形状和属性,然后用适当的力度进行抓取动作。 据了解,科学家研发这种软机器人抓手的最终目标并不是简单地让机器人捡拾东西,而是希望未来机器人能够使用各种专供人类使用的工具。
上面这些研究成果只是CSAIL实验室成果的一部分,e科网将不断跟踪CSAIL实验室的研究进展。
(本文部分内容参考宇辰网;特别声明:本文转载仅仅处于传播信息的需要,如果作者不希望被转载,请联系我们!)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 计算科学
- 人工智能











 赞 5
赞 5
 回复
回复









