我要投稿
我要投稿当无人机越来越小时,其飞行就将耗费更多的能量,特别当它们在空中悬停时。现在哈佛大学的科学家提出一个新的解决方案—一款昵称为“RoboBee”(小蜜蜂)的微型飞行机器人。它像昆虫一样降落在物体表面,研究者成功地降低了这种微型机器人飞行时所需的能量。
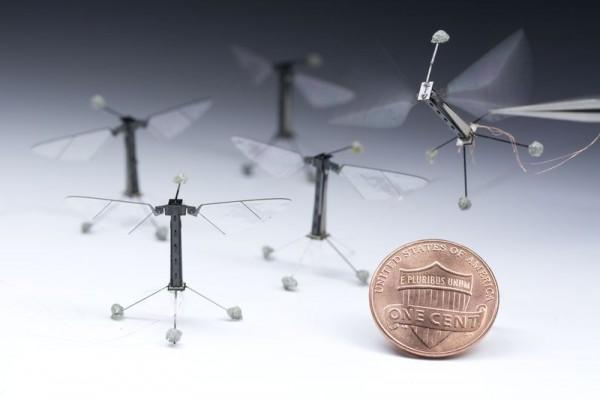
RoboBee的机械部件重量为13.4毫克,总重量约为100毫克,这与一只真正的蜜蜂相差无几。

图:微型飞行机器人RoboBee吸附在木头表面
图:微型飞行机器人RoboBee吸附在树叶表面
这项技术有可能首先被用在军事和间谍用途上,它们可以飞到某个房间里,停留在物体表面,然后搜集屋内人物的对话并传回。研究人员称,这种小憩能力将能让昆虫飞行机器人拥有更持久的飞行能力,这样它们也就能在交通管制、搜救等情境下得到更好的利用。
“ 许多小型无人机的应用要求它们较长时间内都停留在空中,郁闷的是,小型的无人机很快就会耗尽能量。我们希望它们能在高处悬停久一点,但无需增加额外的能量。”
为了找到节约能量的方法,研究者将目光投向了自然界。“许多动物利用暂歇来节省能量,”作者之一的Kevin博士说“但它们用于停留的方法,比如粘性附着,或用爪子抓握,都不适用于只有纸夹子大小的微型机器人,因为这需要精细的运动系统,或者在与物体表面分离时需要很强的力量。”
这些微型机器人采用了静电吸附的方法,与气球附着在毛衣外套表面的原理是相同的。“不过,在气球的例子中,电荷会随着时间逐渐消散,气球也会最终掉落,”论文作者之一Mortiz Graule说,“在我们的系统中,会有少量能量持续供应,保持这种附着状态。”
“这种附着系统最大的优势在于,当脱离物体表面时不会产生导致不稳定的作用力,这对我们这种小型、精细的机器人而言是非常关键的,” Graule说道。在停留于物体表面时,RoboBee的电极垫只需要比悬停时少1000倍的能量,从而大大延长了使用时间。“附着功能的应用不需要复杂的物理学机制就能控制,并且耗能极低,还能附着在多种多样的物体表面,对于轻巧载重量有限的机器人—比如RoboBee—来说,这简直完美。”
除了能在任何物体表面降落之外,RoboBee利用一块电极垫和一块泡沫底板来进行缓冲。它还能像蜘蛛一样,在两棵树之间搭起网来。研究者称,对飞行机器人来说,在类似森林的复杂环境中停留是一个很大的挑战,他们受到了蜘蛛利用蛛丝进行飞跃和附着的启发。

2013年,MIT研发出了这个小型飞行机器人--RoboBee,它的重量只有0.08克,其翅膀每秒最多可扇120次。当时,它需要一个微型小脚架才能降落,这也就意味着它只能在物体表面的上边降落。而现在,这种局限已经被打破,不论是表面的上边还是下边,它都能轻松降落。
这种小憩可不能只被认定为是一项简单的技能,它还将能在小型中长期侦查机器人中扮演重要角色。你不可能让一架四旋翼飞行器对某个区域进行长达20多分钟的侦查工作,因为它没电了,但是,如果有了这个微型飞行机器人,那么情况就完全不同了。在《科学》杂志中发表了另外一篇相关文章的空中机器人专家Mirko Kovac也指出,在侦查类任务中,续航能力对于空中机器人至关重要。
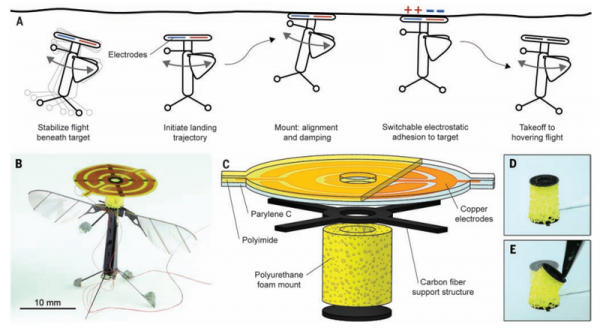
在最新设计的RoboBee中,静电片被安置在机器人的顶部,这让它看起来有点像橡胶飞镖,然后它通过聚氨酯垫片跟机器人连接。这种设计可以让机器人在与物体下表面接触时不一定要保持完全平行的状态,一定的弯曲同样也能顺利地附着在物体表面下方。另外,它与物体的分离也能变得非常简单,通过一个开关按钮即可实现。
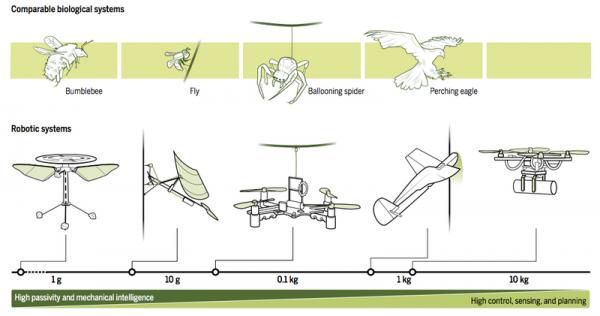
Kovac还在文章中描述了大小各异的飞行动物小憩的方式以及它们对飞行机器人带来的启发。比如大型鸟类利用视觉反馈精准地抓到可以让它们休憩的物体,而像苍蝇这样的小型飞行昆虫则直接飞到目标物体上停在上面即可。不过科研人员可不能只是简单地将它们的空中休憩方式复制到微型飞行机器人上就可以了,而是需要找到某种被动机制。
现阶段的RoboBee离成熟目标很远,因为不论是用于产生静电的电源还是用于控制机器人飞行的计算机,它们都还没被整合到设计里边--目前还只能通过电线来实现。另外,RoboBee还非常容易受到干扰,“如果实验室里有人经过它,那么它的飞行就会受到影响,”论文作者之一Mortiz Graule这样告诉记者。另外,工程师还得为它设定好整个小憩过程的所有数据,不然的话就无法实现,比如速度太快时由其产生的空气流可能会让它偏离原来的方向。“就目前这个情况,让它飞到天花板上都还非常具有挑战性。”
也许等到科研人员解决掉这些问题还需要等上2年的时间,而要真正投入到实际应用则要更久,也许是10年。
文章链接:
M. A. Graule, P. Chirarattananon, S. B. Fuller, N. T. Jafferis, K. Y. Ma, M. Spenko, R. Kornbluh, R. J. Wood, "Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion," Science 20 May 2016: Vol. 352, Issue 6288, pp. 978-982, DOI: 10.1126/science.aaf1092
新闻链接:
Autonomous Flying Microrobots (RoboBees)
(本文参考自多个网络来源,由e科网整理编辑;特别声明:本文转载仅仅处于传播信息的需要,如果作者不希望被转载,请联系我们!)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 飞行机器人