我要投稿
我要投稿
一般来说,机械手有两种普遍的设计流派。第一种是以完成某项工作为导向的简单明了的高效机械手,依靠两三根“手指”(所形成的钳子)轻而易举的完成许多工作。第二种是完全按照人类双手进行精确模拟——拥有一根拇指的其他四根手指的设计,基于人类数百万年进化而成的双手去设计机械手,因为我们身边所有的物体都是根据我们的双手去设计的,所以如果希望机器人能够尽可能做到更多事情,最好是拥有一双像真人一样的手。
鉴于真实人手内在的复杂性,在设计拟人仿生手时不可避免的采取了许多折中方案,让它们正常工作的同时还保持了人手的外形。来自西雅图华盛顿大学的Zhe Xu和Emanuel Todorov开创性的开发了一款有史以来最精细且运动最准确的拟人仿生手,它的终极目标是完全取代人类双手。
关于设计一种新的机械手对他们的重要性,Xu表示:“拟人机械手设计的常规方法是,用类似铰链、联动装置和平衡环等零件来实现生物部件的机械化,从而将看似复杂的人体参照物进行了简化。这种方法对于理解并模仿人手的运动原理有一定帮助,但不可避免的制造了一些人与机械手之间的不良差异,因为人手上大多数显著的生物力学特征都在机械化的过程中被丢弃了。这些机械手和人手生物力学在本质上的不匹配阻碍了我们使用自然的手部运动来直接控制它们。因此,还没有任何一只拟人机器人手可以达到人手的灵巧程度。”
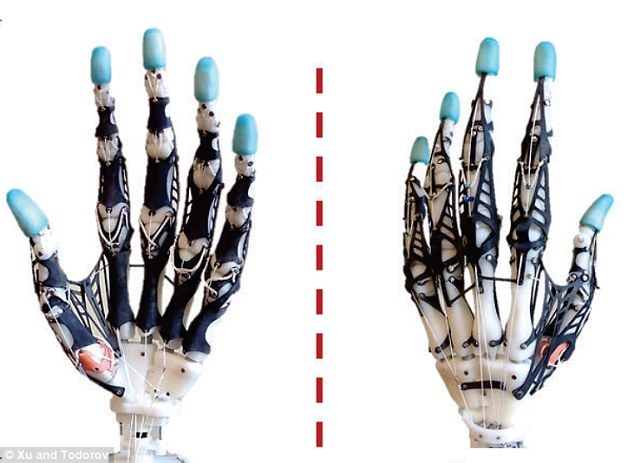
Xu和Todorov决定从零开始他们的机械手项目,以尽可能精确的方式机械的复制人手。首先,他们通过激光扫描出了人手的骨骼,然后通过3D打印出匹配的人工骨骼,使他们能够复制出我们人手所拥有的灵活的连接关节。
Xu解释说:“例如,我们对生拇指的运动依靠于腕掌关节(CMC)中梯形骨的复杂形状。由于梯形骨的不规则形状,CMC关节轴没有固定的精准位置。所以说,目前所有的拟人机械手都是采用传统的机械连接,这种连接方式固定的旋转轴。因此,这些传统的机械手都无法还原自然的拇指运动。我们通过扫描尸体手骨架,3D打印了人工骨骼,并且该人工手指关节的运动范围、刚度、和动态行为都非常接近人手。我们的机械手设计独一无二的保留了重要的人手生物力学信息,达到了解剖级别。”
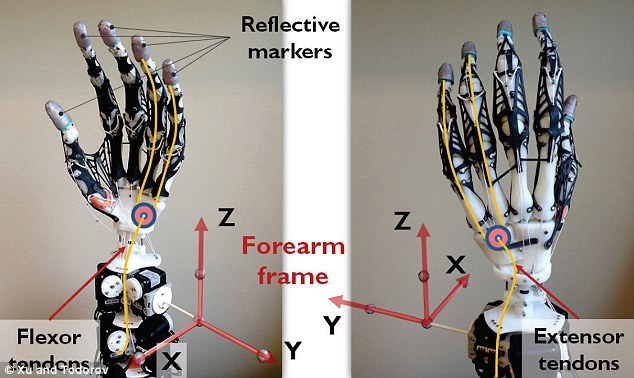
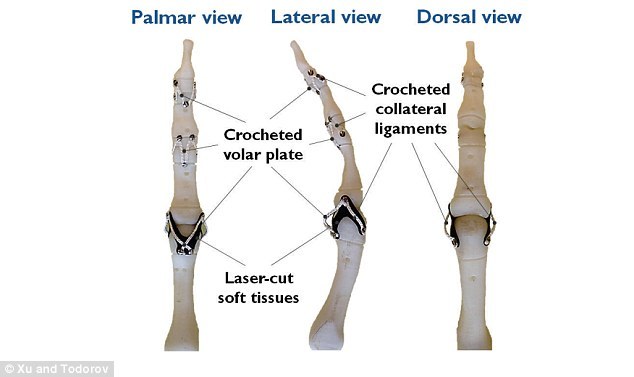
关节韧带(身体用来固定关节且控制它们活动范围的部分)的材料使用了高强度的Spectra带,并带有激光切割的橡胶板来代替增加关节依从性的软组织。伸肌和屈肌的肌腱(用来矫直和弯曲手指的部分)也由Spectra带构成,同时用更多的激光切割橡胶板代替了腱鞘和伸肌腱帽,后者是通过包裹手指来使其应对灵活性和扭矩的复杂的蹼状多层结构。
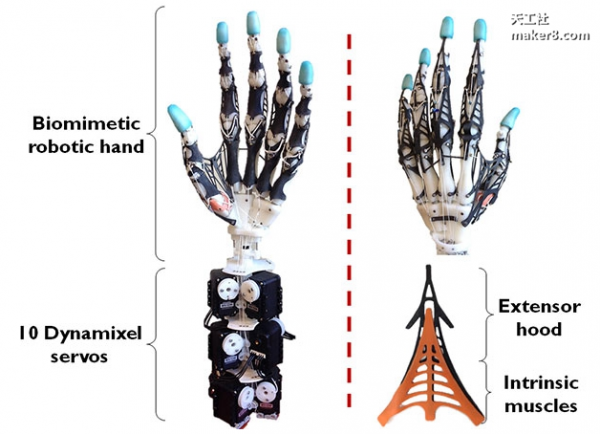
UW(华盛顿大学缩写)手的最后一部分构成是肌肉,它是由一排10个Dynamixel伺服系统组成,它们的电缆布线也紧密的模仿了人手的腕隧道。
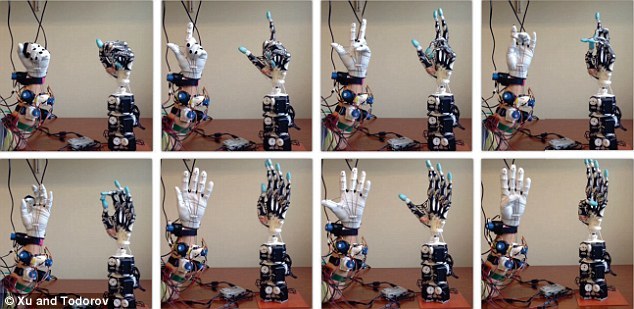
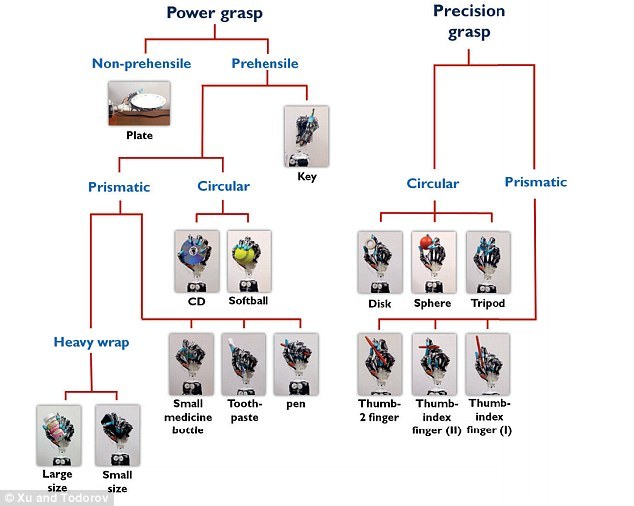
除去工艺绝伦之外,我们还可以通过waldo遥控器去操纵UW手准确的模仿人手的各种抓拿动作。研究人员认为,因为他们的机器人动力学非常接近真实的人手,因此,用户可以在没有任何力反馈的情况下用手进行复杂的操作。用户也可以在研究人员归因于与人手运动学高度匹配的机械手上,在零力回馈的情况下用手进行复杂的操作。
真正的关键在于:拟人机械手完全按照模拟人手来设计,这意味着它可以模拟人手的动作,这主要取决于它的构造,而非一种电脑编程。在遥控操作方面,它也有很多潜在优势,因为操作者可以更加无缝的利用自己双手的灵活性。
更有趣的是,研究人员认为他们所研究的机械手可以用来“为肢体再生的研究做3D支架”。Xu解释说:“对义肢假手的控制主要依赖于人的大脑。因此,如果义肢的设计更加接近于生物本体,那同样的神经义肢技术就会更加有效。生物相容性材料现在已经可以被打印成骨架,可生物降解的人造韧带也可以被用来取代撕裂的前交叉韧带,人类肌肉已经成功地在培养皿内被培育出来,而且外周神经在合适的条件下也可以再生。所有这些有前途的新技术都需要适合移植细胞生长的支架。我们将与生物学和组织工程学的研究人员合作,进一步探索仿生机械手在神经义肢和肢体再生等新兴领域作为生物制造设备/支架的潜力。”
华盛顿大学的Xu Zhe和Emanuel Todorov的“高仿生拟人机械手对假肢再生的设计”将于2016年5月份在斯德哥尔摩2016年5月份的ICRA(IEEE International Conference on Robotics and Automation)会议上呈现。
资源链接:
(本文文字来源:科技世界网)
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 3D打印
- 仿生机械手










 赞 1
赞 1
 回复
回复