我要投稿
我要投稿
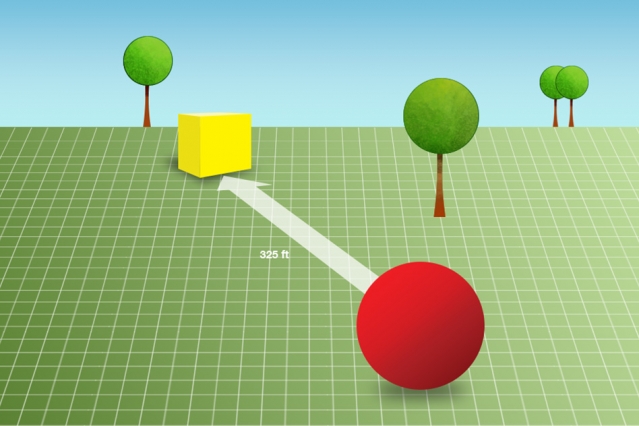
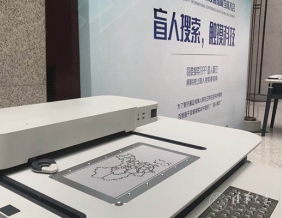
图:CSAIL研究人员构建了一个新的红外深度感应系统,可以在户外和室内都有效工作。
微软Kinect是一种3D体感摄影机,为机器研究人员带来了福音。因为便宜的现成的深度传感器能够使他们快速而低成本地进行原型系统创新,以使机器人来规划路径,理解他们所处的环境,而且进行导航。
但Kinect传感器,使用红外光来测量深度,很容易被周围的红外光混淆。甚至在室内,他们往往要求低光照条件下;在室外,他们常常失效。
在今年五月的国际机器人与自动化会议上,来自麻省理工学院的计算机科学与人工智能实验室(CSAIL实验室主页)研究人员将展示他们研发的一种新的红外深度感应系统,该系统是将10美元激光反射器连接到智能手机打造而成的。该系统既可以在室内使用也可以在室外使用。
研究人员表示,使用廉价的内置红外激光器的手机可以进一步应用到个人车辆,如高尔夫球车或轮椅,以帮助它们实现自动驾驶。该系统也可以内置于小型自主机器人,像亚马逊的包裹递送无人机,使用该系统可以避免在不可预知的环境下使用昂贵的激光测距仪,成本费用将大大降低。
“我们研究组一直大力推动使用以设备为中心的方法来构建智慧城市,而不是今天普遍使用的以车辆和基础设施为中心的方法,”电气工程和计算机科学教授Li-Shiuan Peh如此表示,正是他的研究组开发了该系统。 “这是因为手机比汽车具有更快速的升级和更换周期。汽车的升级周期大约需要十年的时间,而手机每隔一年或两年就需要更换。“
目前红外深度传感器有好几个品种,但他们都首先发射激光到环境中,并测量反射。但是来自太阳或人造光源的红外灯可以淹没反射信号,使测量结果毫无意义。
为了弥补背景噪声的影响,商用激光测距仪使用高能量脉冲激光。但是为了减小对眼睛的伤害,这些脉冲都非常短。然而为了检测这种短暂的反射导致设备的成本达到数千美元。
MIT开发的这套系统需要进行多次测量,它们定时发射低能量的光脉冲。从本质上讲,它捕捉四帧图像,其中两个记录激光信号反射,另外两个记录环境红外光。然后在激光信号记录结果中减去环境背景光。
在他们的原型系统中,研究人员使用安装有每秒30帧摄像头的手机,拍摄四幅图片,每幅间隔1/8秒。该深度测量系统还使用了被称为主动式三角测量技术。安装在该原型系统手机底部的激光,在一个单一的平面发射激光。因此返回光的角度可以正好落在相机的二维传感器上。
该系统的测量结果显示:在3至4米的空间范围,该系统的深度测量精度为毫米。在5米的空间,深度测量精度下降至6厘米。研究人员使用由新加坡 - 麻省理工学院联盟开发的无人驾驶高尔夫球车上测试了他们的系统,发现当车辆以每小时高达15公里移动时,其深度分辨率是足够的。

相机技术的不断进步也将不断提高该系统的测量精度。但是目前大多数手机摄像头使用滚动快门。这意味着,相机只有当读取完所有光检测器的测量数据之后才会开始下一次测量。这种持续的读取过程将大约占时三十分之一秒,在这期间其实还可以测量很多次。
因此,在MIT深度测量系统的原型中,发射的光脉冲必须具有足够长的时间。然而未来智能手机的摄像头将使用一个“全局快门”,这意味着他们将能立即读出所有的探测器测量结果。这样改系统就能发射更短的光脉冲,有效范围也将得到增加。
新加坡交通运输部的未来部主任Lam Wee Shann表示: “MIT的新型激光深度感应系统可以帮助推进自驾车的发展,使我们一步步实现自动驾驶。”
文章链接:
A smartphone-based laser distance sensor for outdoor environments
如若转载,请注明e科网。
如果你有好文章想发表or科研成果想展示推广,可以联系我们或免费注册拥有自己的主页
- 深度测量